

Mechanical arm
A manipulator and arm technology, applied in the field of manipulators, can solve the problems of complicated wiring, difficult maintenance, complicated design, etc., and achieve the effects of fast and flexible movements, lightening labor intensity, and improving precision.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0009] The preferred embodiments of the present invention will be described in detail below in conjunction with the accompanying drawings, so that the advantages and features of the present invention can be more easily understood by those skilled in the art, so as to define the protection scope of the present invention more clearly.
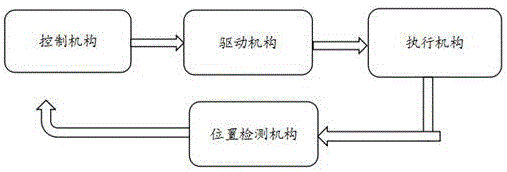
[0010] A manipulator, which is mainly composed of four parts: an actuator, a drive mechanism, a control mechanism, and a position detection mechanism. The drive mechanism is respectively connected with the actuator and the control mechanism. The drive mechanism is in the form of hydraulic pressure. The executive mechanism includes four main parts: hand, wrist, arm and column. The control mechanism is used to command the action of the manipulator. The position detection mechanism is respectively connected with the executive mechanism and the control system. The position is transmitted exactly to the actuator.
[0011] The specific operating princi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More