

Task allocation and conflict-free path planning method for pull-type multi-AGV system
A technology for task allocation and path planning, applied in general control systems, control/regulation systems, program control, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
[0108] Example: The layout grid diagram of a production workshop is as follows Figure 6 As shown, the channel width allows only one trailered AGV to pass through at a time. Trailer-type AGV can only run forward, not backward. The randomly generated transportation tasks and their specific information are shown in Table 1.
[0109] Table 1 Transportation task list
[0110]
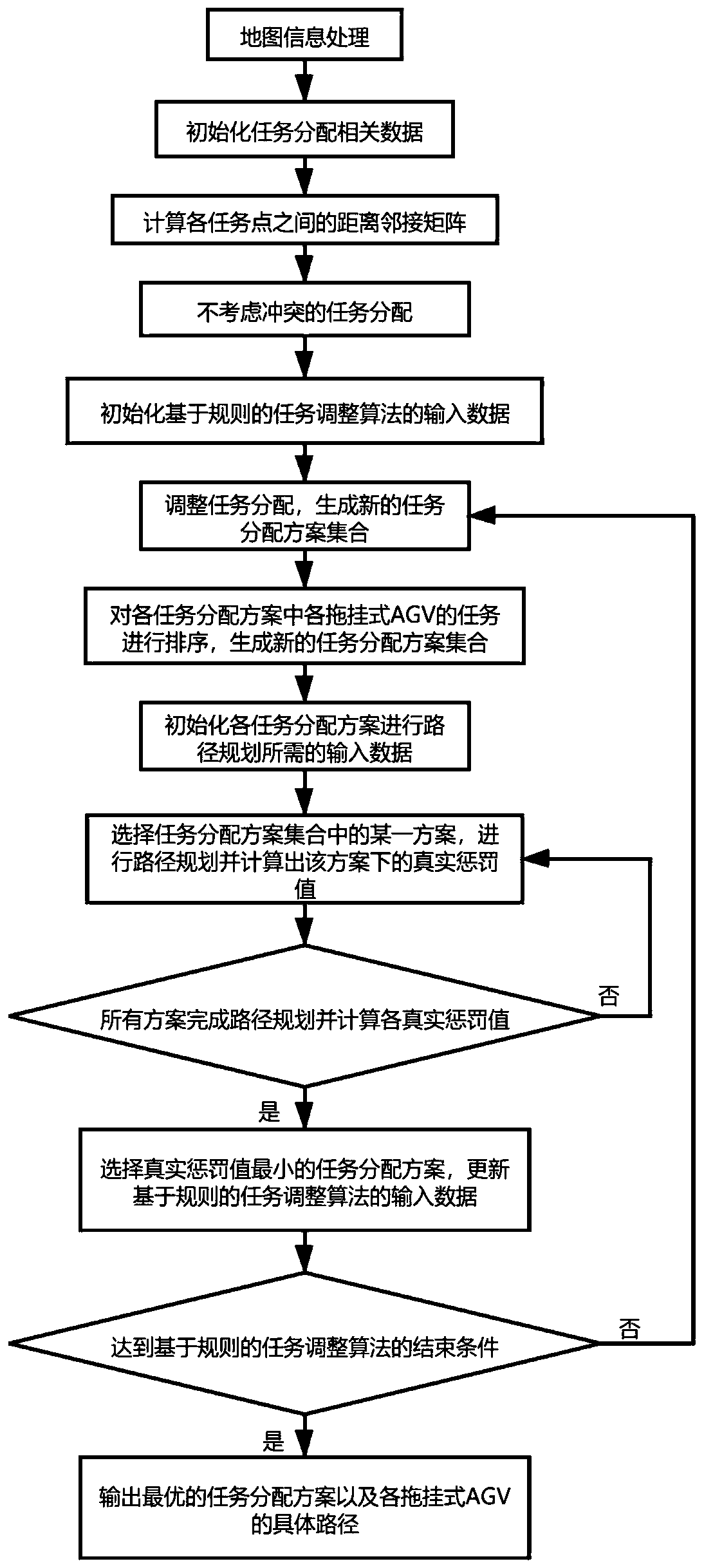
[0111] Such as image 3 As shown, this embodiment discloses the method for task allocation and conflict-free path planning of the trailer-type multi-AGV system, and the specific implementation steps are as follows:
[0112] Step 1. Process the layout map of the production workshop to generate a grid map MAP and add a time dimension to record it as a spatio-temporal map map. The grid map MAP needs to have the position information of the cutting points of all workstations.
[0113] Step 2. Initialize data related to task allocation, including the maximum number of AGVs agv_available, the maximum number...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More