

A Surface Grinding Robot for Special Steel Bars Based on Parallel Drive Mechanism
A driving mechanism and robot technology, which is applied to the parts of grinding machine tools, manipulators, program-controlled manipulators, etc., can solve the problems of uncontrollable quality of grinding operations and large cumulative errors
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0027] In order to deepen the understanding of the present invention, the present invention will be further described below in conjunction with the examples, which are only used to explain the present invention, and do not constitute a limitation to the protection scope of the present invention.
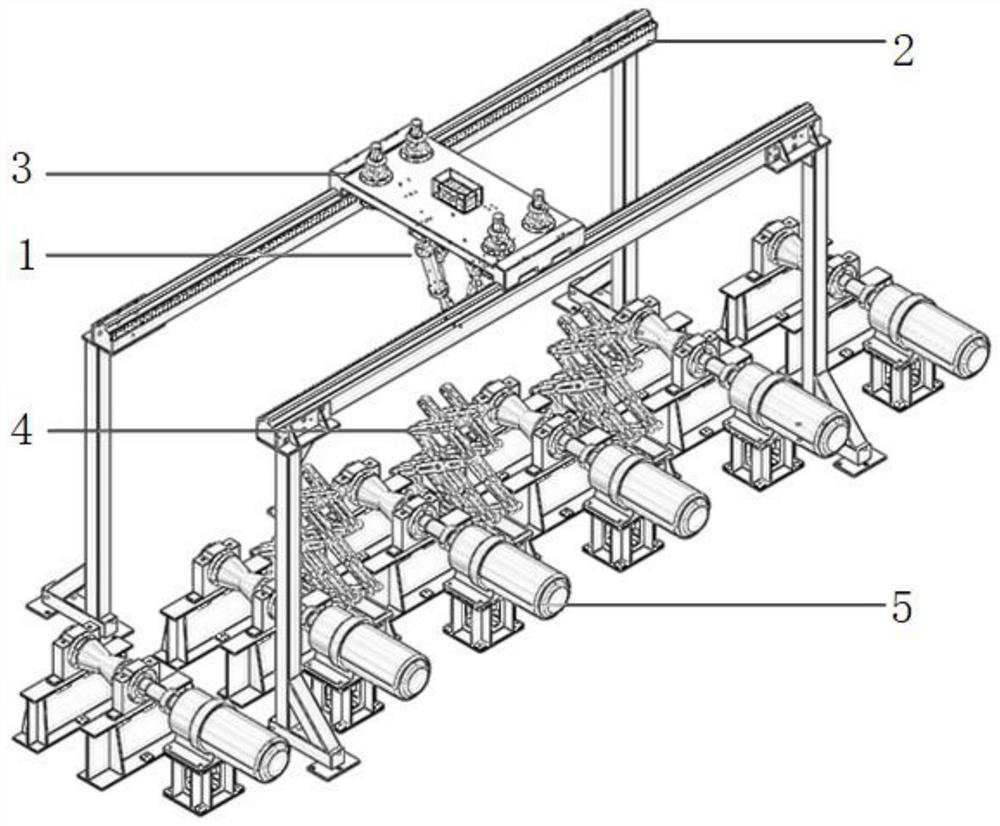
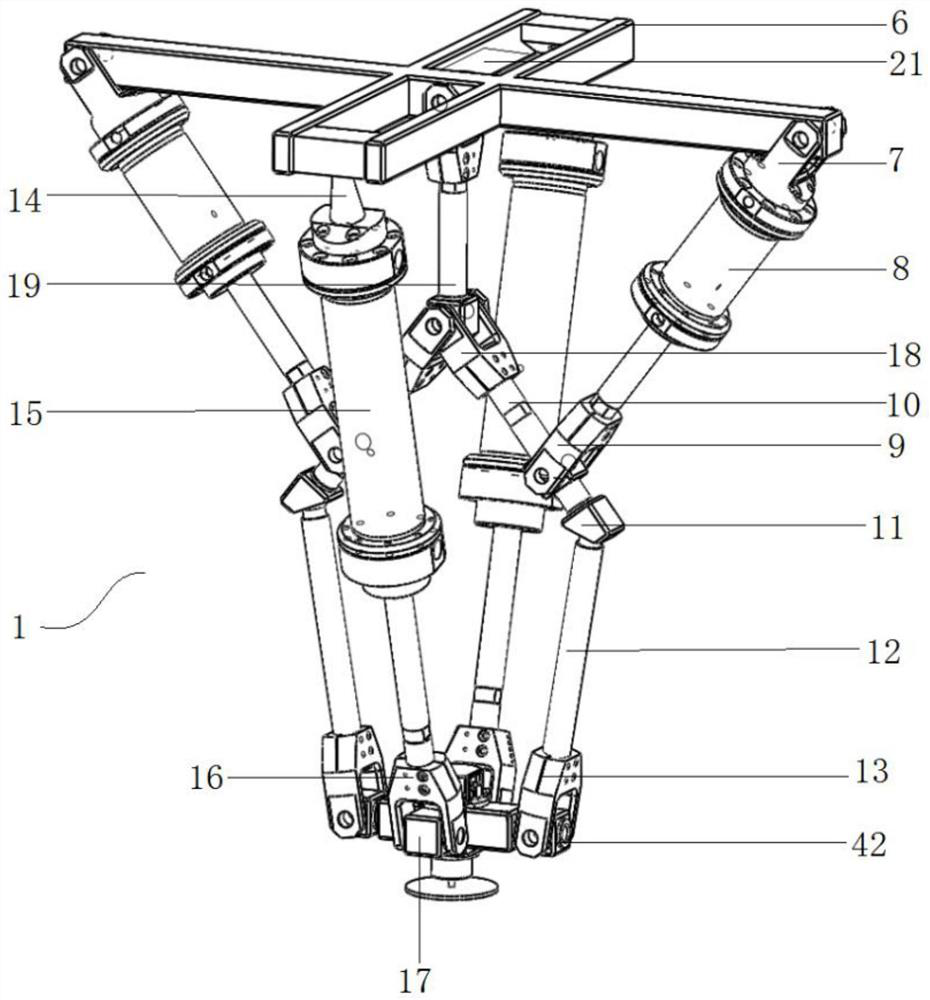
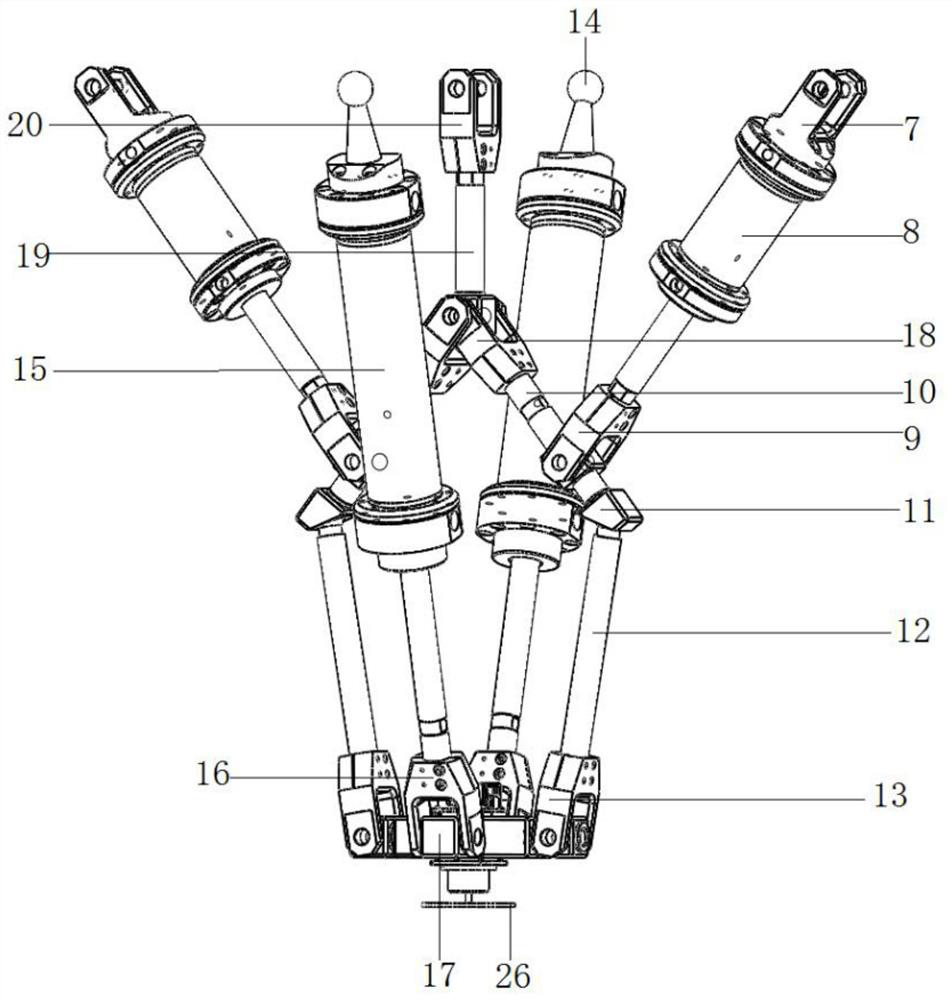
[0028] according to Figure 1-10 As shown, this embodiment provides a special steel bar surface grinding robot based on a parallel drive mechanism, including a five-degree-of-freedom grinding robot arm 1, a truss 2, a mobile platform and a controller 3, a bar lifting mechanism 4 and A roller table 5, a mobile platform and a controller 3 are movable on the truss 2, and a five-degree-of-freedom grinding mechanical arm 1 is installed below the mobile platform and the controller 3, and a bar is provided at the lower position of the truss 2 Lifting mechanism 4 and roller table 5, and there are multiple sets of bar lifting mechanism 4 and roller table 5;
[0029] The five-degree-of-freedo...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More