Reversing trajectory tracking method
A trajectory tracking and trajectory technology, which is used in motor vehicles, vehicle position/route/altitude control, and non-electric variable control, etc., can solve the problems of heavy algorithm calculation, lack of real-time performance, and easy to be affected by environmental changes. Achieve the effect of accurate tracking ability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach
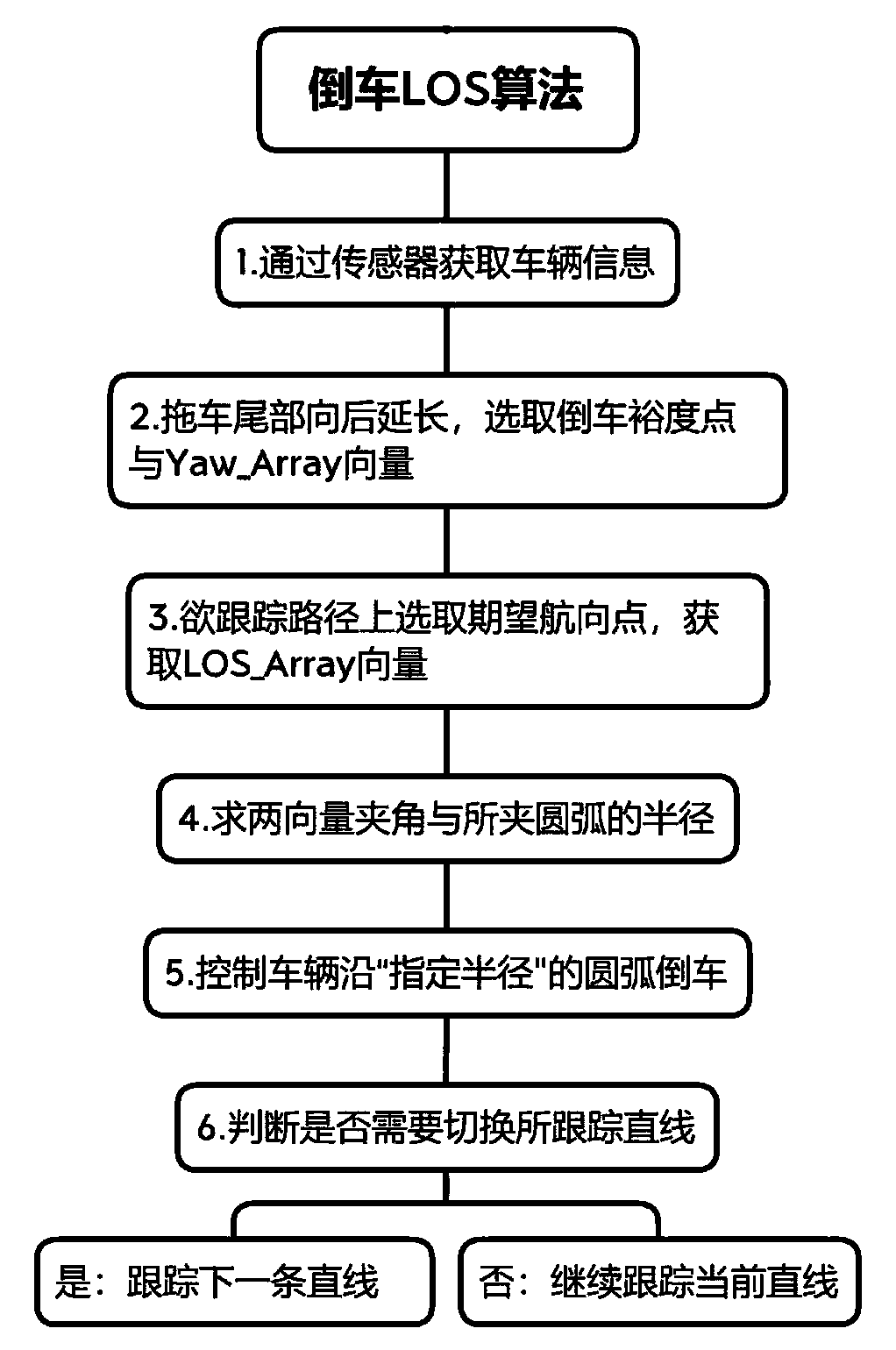
[0077] combine figure 1 , the specific embodiment of the present invention comprises the following steps:
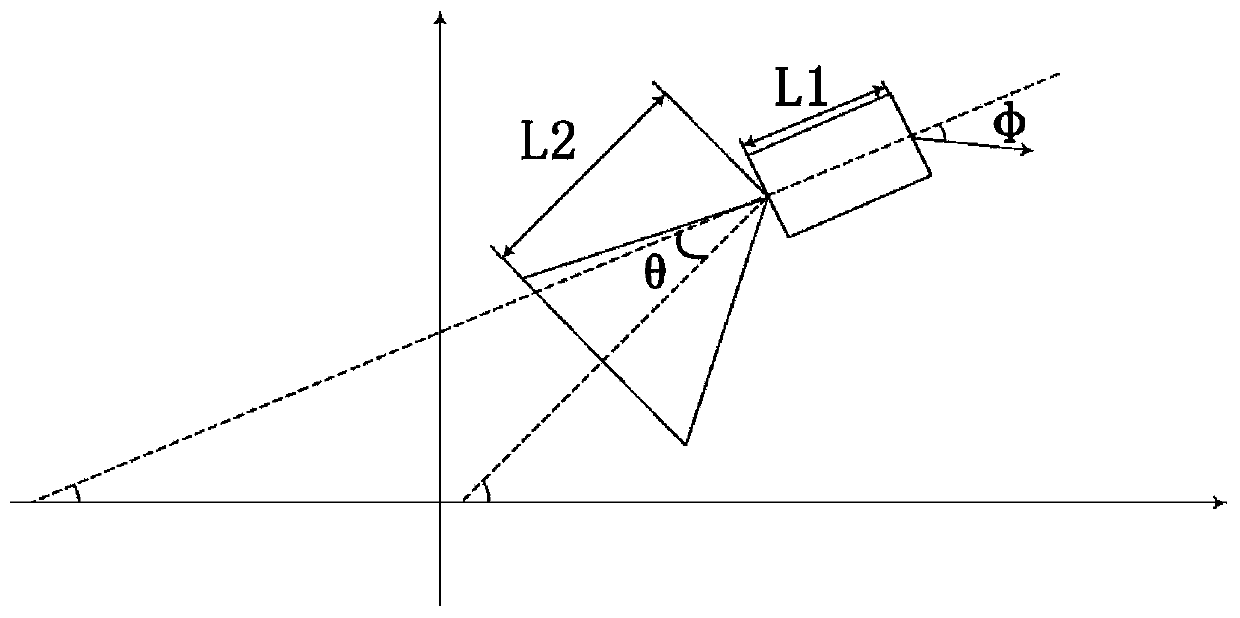
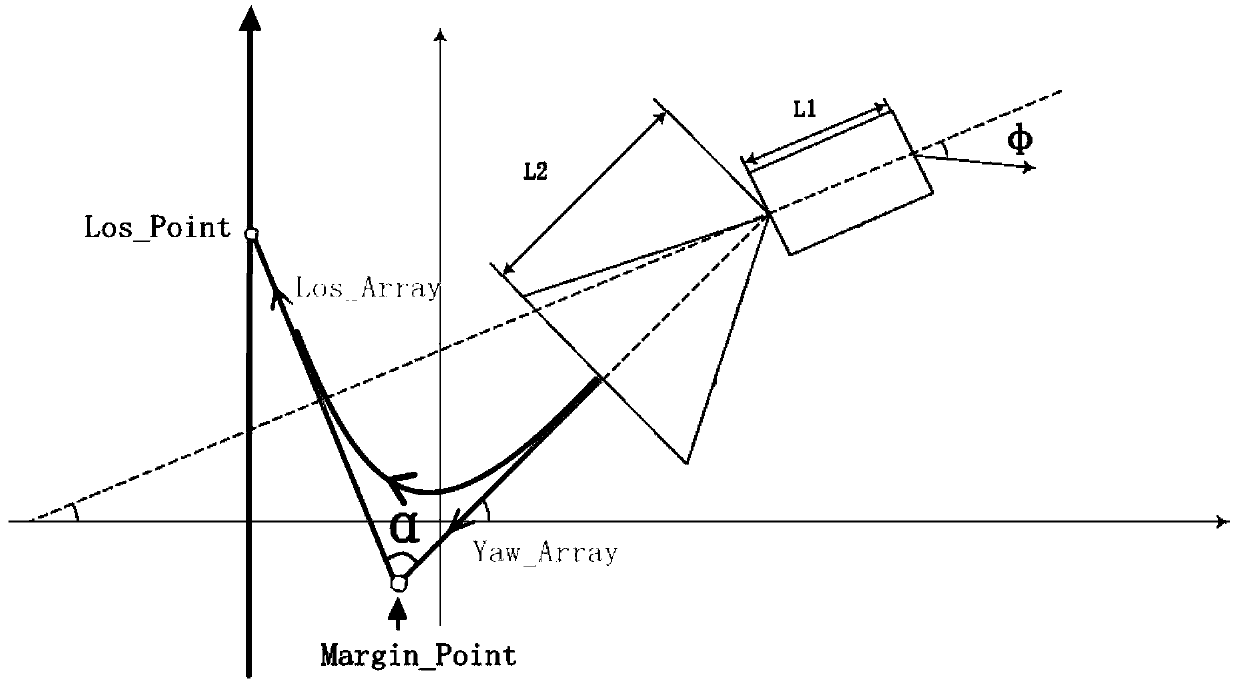
[0078] Step 1: The main object of the present invention is to control the real object of the tractor and the rear trailer to run in reverse. Therefore, sensors are required to measure the driving data of the vehicle. The important data required are:
[0079] 1. The coordinates of the tractor can be positioned through the UWB positioning module or the Bluetooth positioning module.
[0080] 2. The connection angle θ between the tractor and the rear trailer can be measured with an angle encoder.
[0081] 3. The driving direction of the tractor can be measured by electronic compass or gyroscope.
[0082] 4. The driving direction of the rear trailer can be measured by an electronic compass, or can be obtained by superimposing the driving direction of the tractor through an angle encoder.
[0083] 5. The coordinates of the two endpoints of the path to be traced, and the di...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More