

Mobile robot navigation system and mobile robot
A mobile robot and navigation system technology, applied in navigation, surveying and navigation, control/regulation systems, etc., can solve problems such as limited navigation accuracy, high cost, easy loss of robot relative coordinates, etc., to improve walking accuracy and reduce use costs , the effect of omitting auxiliary equipment and algorithms
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0027] The specific implementation manners of the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments. The following examples are used to illustrate the present invention, but are not intended to limit the scope of the present invention.
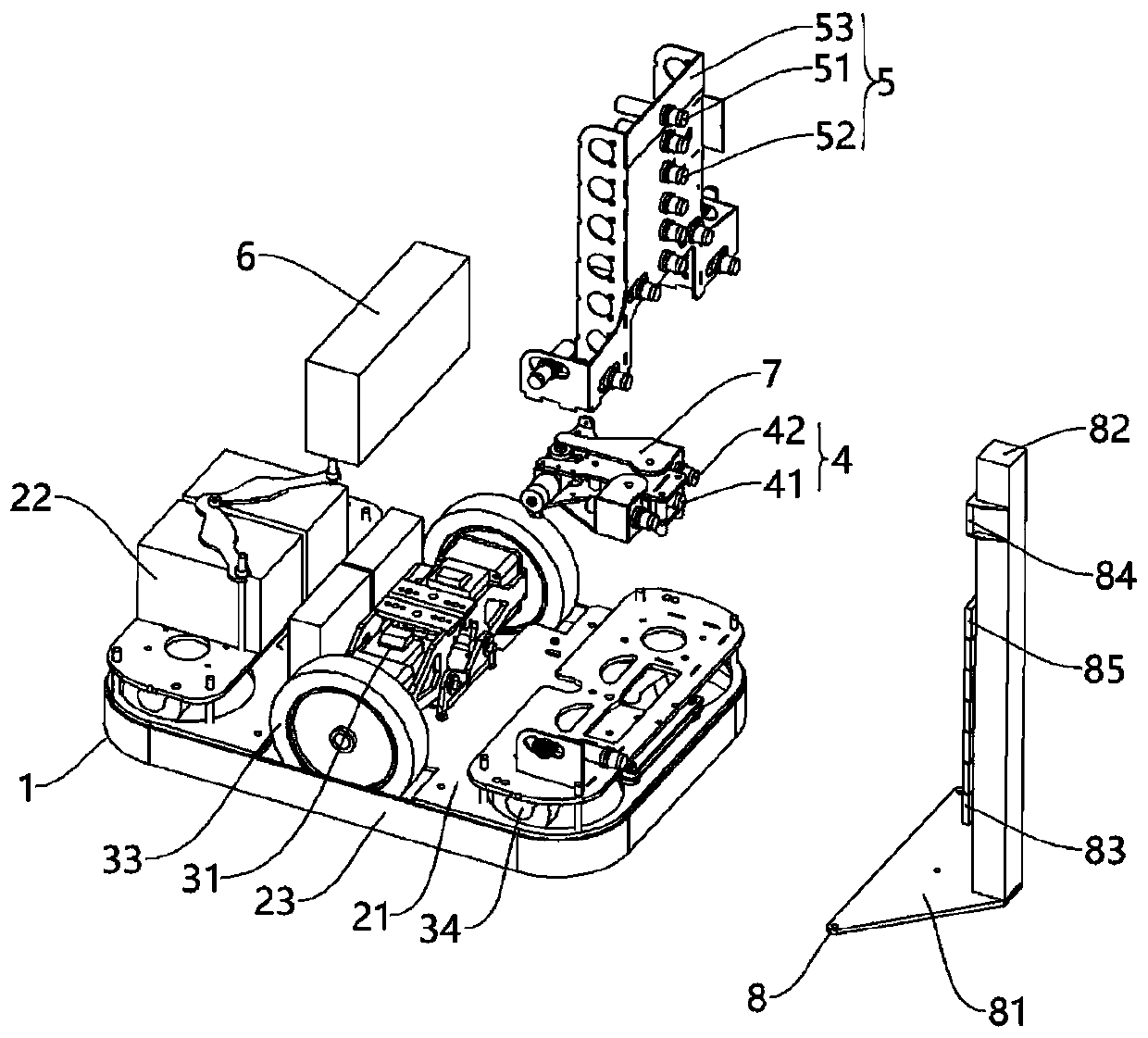
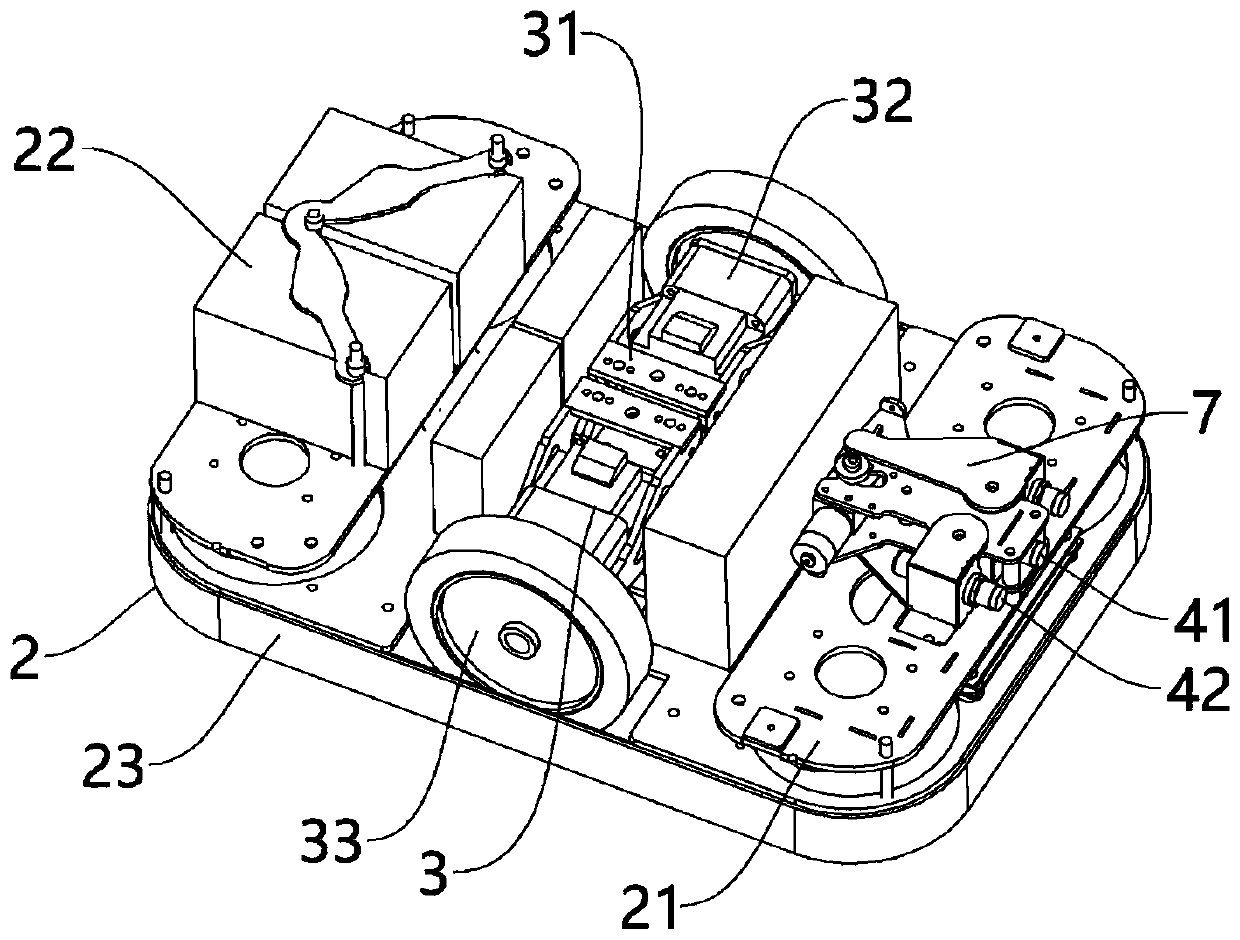
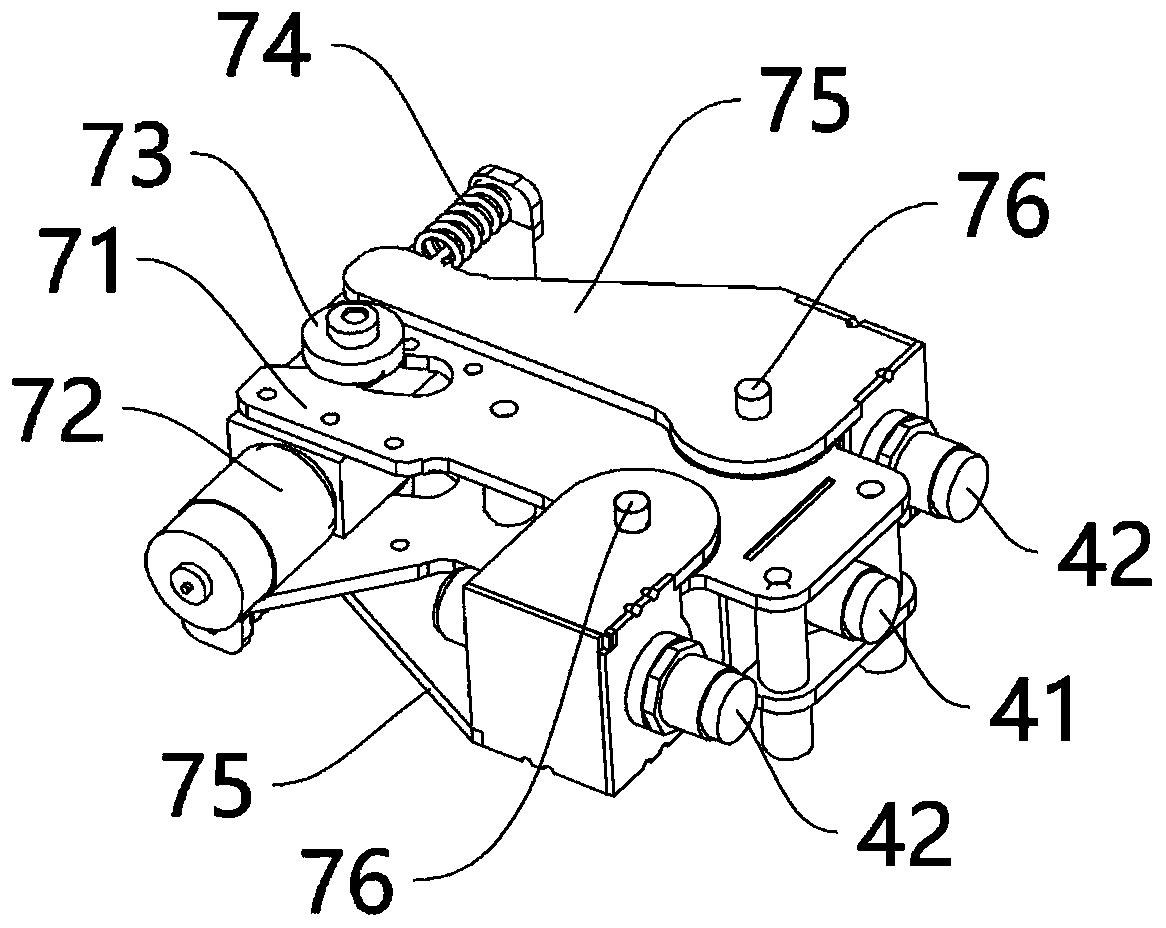
[0028] A preferred embodiment of a mobile robot navigation system of the present invention, such as Figure 1 to Figure 8 As shown, the mobile robot 1 and the target board 8 are included, and the walking information of the mobile robot 1 is recorded on the target board 8 to feed back the walking signal to the mobile robot 1 . The mobile robot 1 includes a body 2, a walking mechanism 3, a navigation sensor group 4, a position sensor group 5 and a control system 6. The traveling mechanism 3 is used to drive the mobile robot 1 to move, and the guiding sensor group is used to detect whether the heading of the traveling mechanism 3 is correct. The position sensor group 5 is us...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More