

Cooperative vehicle positioning method based on fusion of GPS and vehicle ranging information
A technology of distance measurement information fusion and vehicle positioning, applied in the field of collaborative vehicle positioning, to meet the effect of timeliness requirements
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
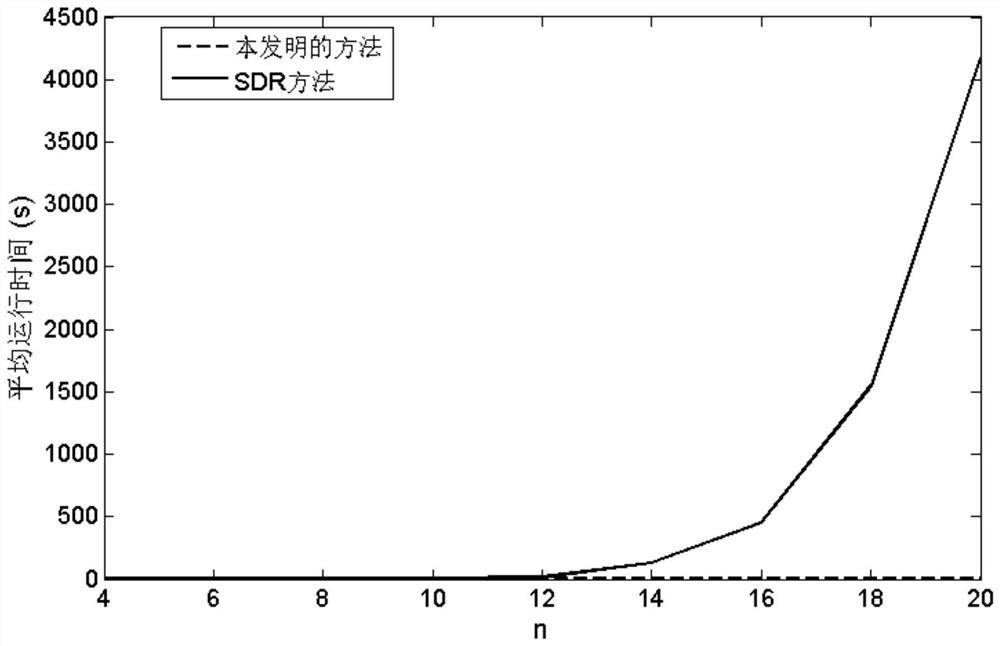
[0069] Example 1: Assuming the covariance parameter σ of GPS observation information i =5(i=1,...,n), the covariance parameter σ of the observation information of the vehicle ranging sensor ij =3 (1≤i≠j≤n). figure 2 The average running time of the method of the present invention and the SDR method on a personal computer (Intel(R) Core(TM) i7-6700CPU 3.40GHz, memory 8GB) was compared when the number of vehicles n gradually increased from 4 to 20. It can be seen that both methods can calculate quickly when the number of vehicles is small (n≤12). However, as the number of vehicles increases, the calculation time required by the SDR method increases rapidly, but the method of the present invention can still calculate quickly. In particular, when the number of vehicles is n=20, the average running time of the SDR method is 4168 seconds, while the method of the present invention is only 1.3 seconds.
Embodiment 2
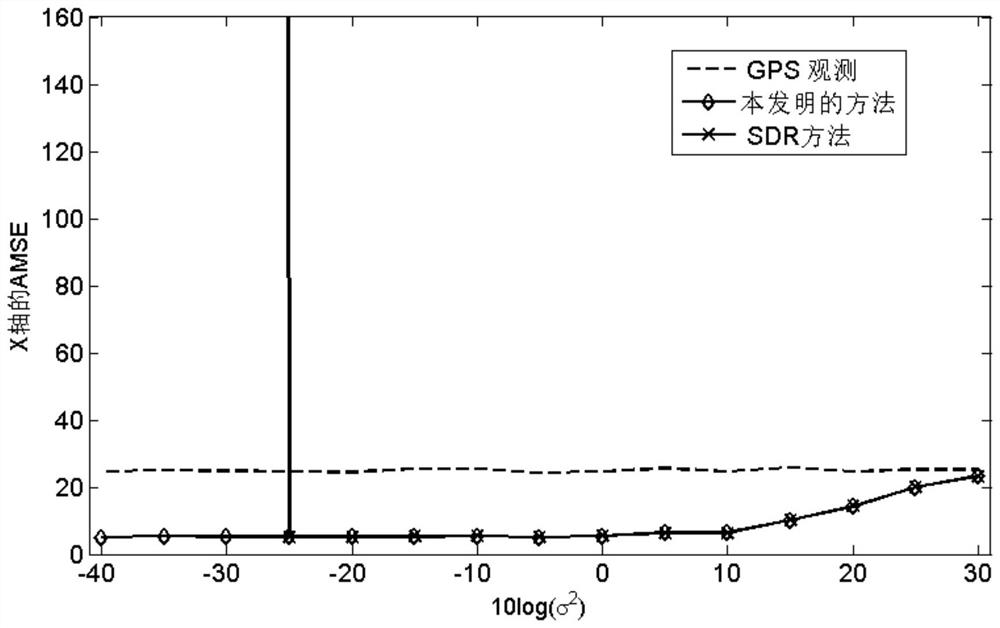
[0070] Example 2: Assuming the covariance parameter σ of GPS observation information i =5(i=1,...,n), the covariance parameter of the observation information of the vehicle ranging sensor image 3 with Figure 4 compared the σ 2 Gradually increasing from -40dB to 30dB, the average mean square error (average MSE, AMSE) of the method of the present invention and the SDR method on the X-axis and Y-axis. It can be seen that the SDR method in σ 2 smaller (σ 2 ≤-25dB), there will be divergence, that is, the positioning error of the fusion of GPS and vehicle ranging information is higher than the positioning error of GPS observation. The method of the present invention can effectively improve the accuracy of vehicle positioning, and the more accurate the vehicle ranging information (σ 2 The smaller ), the greater the improvement in vehicle positioning accuracy.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More