

3D color point cloud registration method based on global optimization and multi-constraint condition iteration
A global optimization, color point cloud technology, applied in computer parts, image data processing, instruments, etc., can solve the problems of long registration time and low registration accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0129] The present invention will be described in detail below in conjunction with the accompanying drawings and specific embodiments.
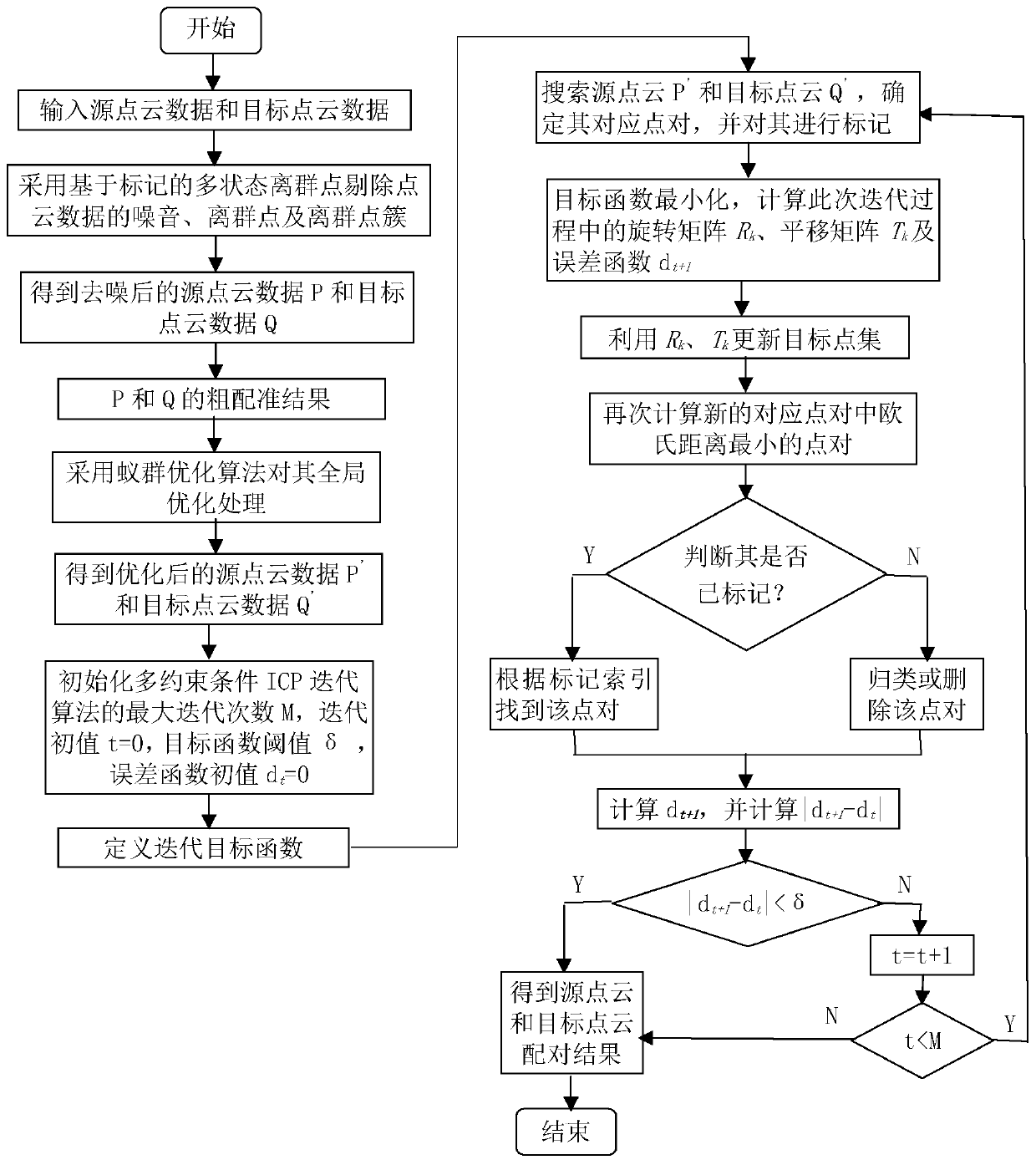
[0130] The present invention is a 3D color point cloud registration method with global optimization and multi-constraint condition iteration, such as figure 1 As shown, the specific steps are as follows:
[0131] Step 1, using marker-based multi-state outliers to eliminate noise, outliers and outlier clusters in the original point cloud data; specifically follow the steps below:
[0132] Step 1.1, use the k-d tree to search the neighborhood of the point cloud;
[0133] Step 1.2, after step 1.1, calculate the point cloud normal vector with the local surface fitting method of moving least squares method;
[0134] Step 1.3, after step 1.2, set different thresholds for different point cloud data, compare the ratio of the orthogonal component of point normal difference with the set threshold, and mark outliers as the judgment conditions of isola...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More