

Three-dimensional group unmanned aerial vehicle parallel type multi-target search cooperative operation method
A machine-parallel, unmanned aerial vehicle technology, applied in the field of unmanned aerial vehicle target search
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0092] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
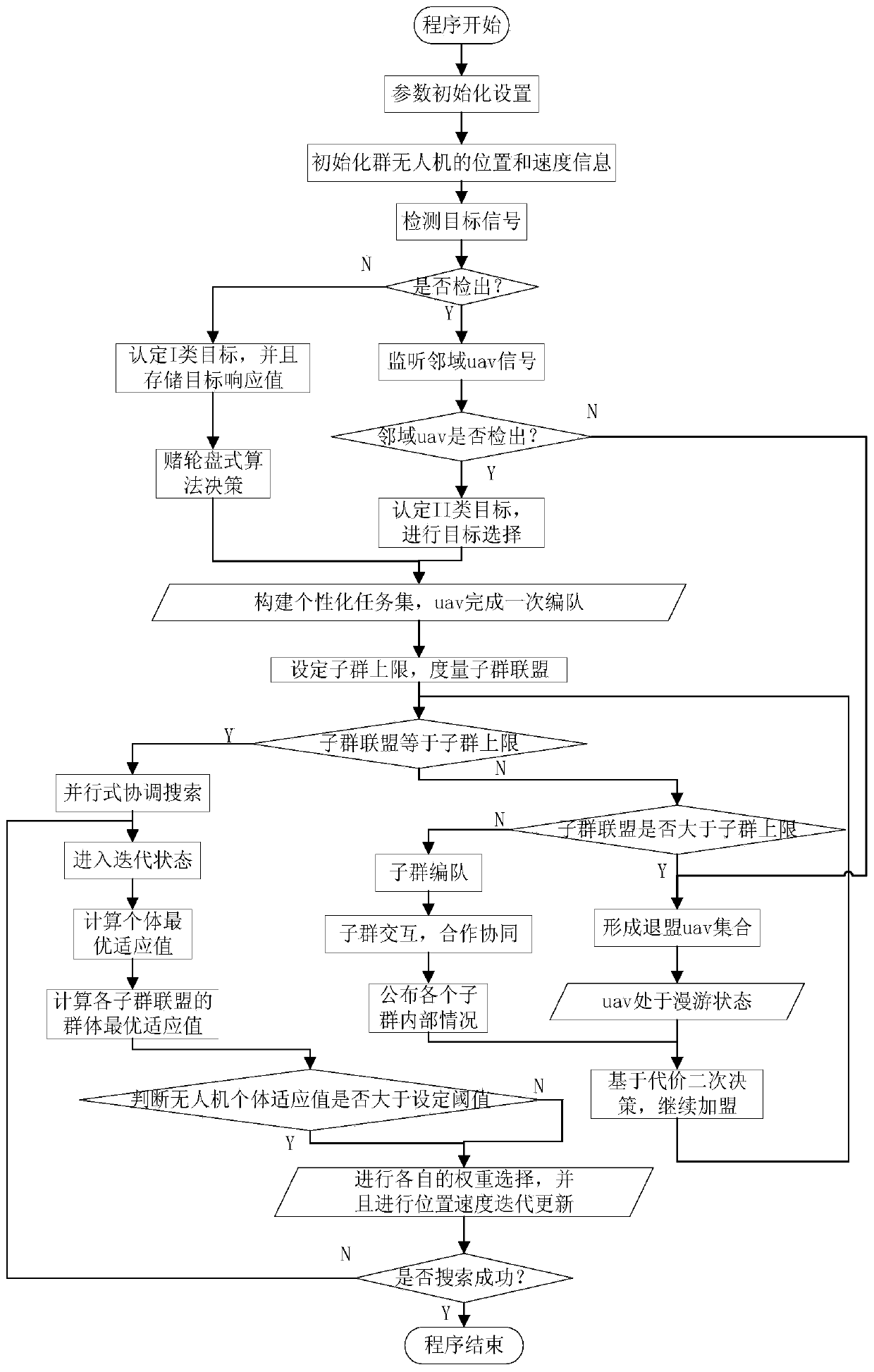
[0093] like figure 1 As shown, a 3D swarm unmanned aerial vehicle parallel multi-target search collaborative operation method includes the following steps:
[0094] Step 1: Construct a three-dimensional space search environment, set various parameters, randomly initialize the position and speed of the group UAVs, and randomly initialize the position of the target.
[0095] In the closed three-dimensional space R 3 In , the multi-target search problem of swarm UAVs can be represented by triples {U,T,E}:
[0096] (1) Search subject U: U={U i , i=1,2,...,N}, wherein, N>>M, N represents the number of drones in the group, and M represents the number of targets;
[0097] (2) Search object T: T={T j ,j=1,2,...,M},M>>1;
[0098] (3) Search environment E: dynamic unknown environment; wherein, the UAV swarm detects the radio frequency signal sent by the com...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More