

A relative position adaptive control method for a spacecraft approaching a space tumbling target
An adaptive control and relative position technology, applied in attitude control and other directions, can solve problems such as inability to strictly guarantee mission safety, complex parameter selection process, and limited processing capacity of spacecraft onboard computing equipment
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
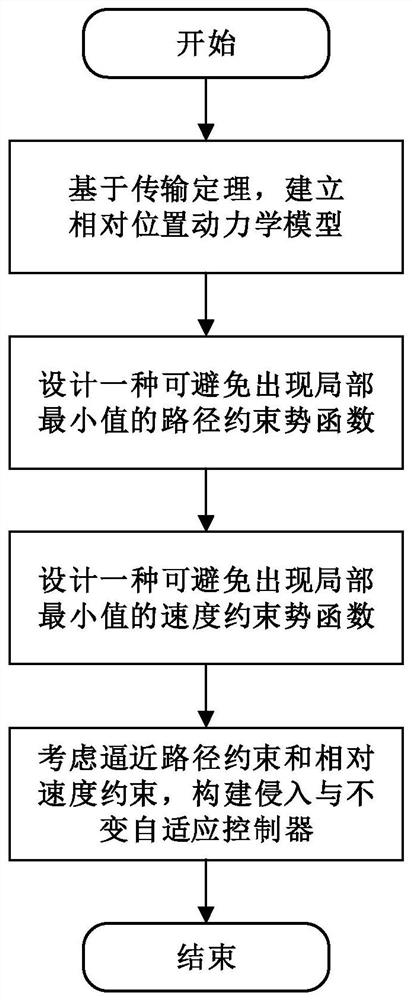
[0070] In the first step, based on the transport theorem, a relative positional dynamics model is established.
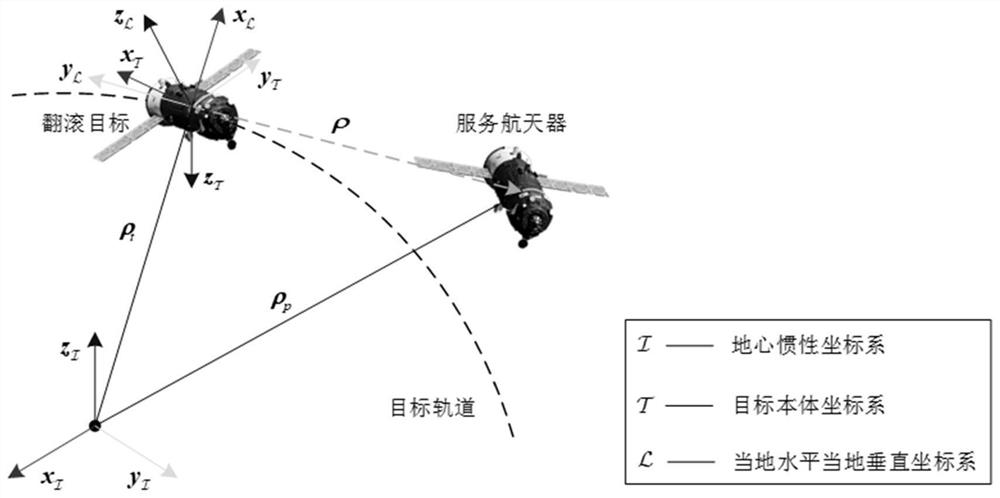
[0071] like figure 2 As shown, with the center of the earth as the origin, the earth-centered inertial coordinate system is established With the center of mass of the space tumbling target as the origin, establish a local horizontal local vertical coordinate system and target system Different from the traditional relative position dynamics modeling method (the relative position dynamics model is established in the local horizontal and local vertical coordinate systems), the present invention is based on the transmission theorem, and establishes a new relative position dynamics model in the target system as follows:
[0072]
[0073]
[0074] Among them, ρ represents the position vector of the spacecraft in the target system relative to the space tumbling target; v represents the velocity vector of the spacecraft in the target system relative to the space...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More