

Multi-dimensional medicine dispensing robot
A dispensing robot, multi-dimensional technology, applied in the direction of medical containers, mixers, pharmaceutical packaging, etc., can solve the problems of affecting the flow of purification air, limited deployment methods, pollution, etc., to achieve ingenious design structure, improve work efficiency, and flexible operation Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
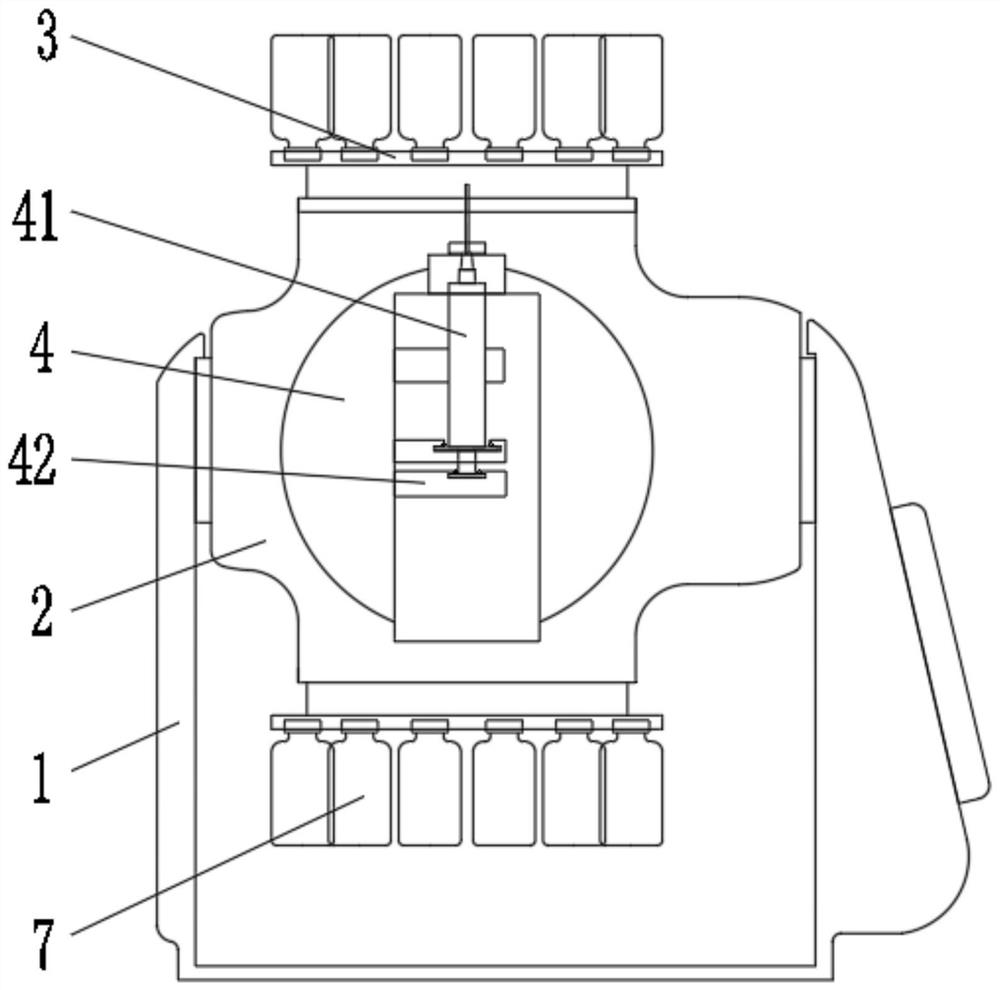
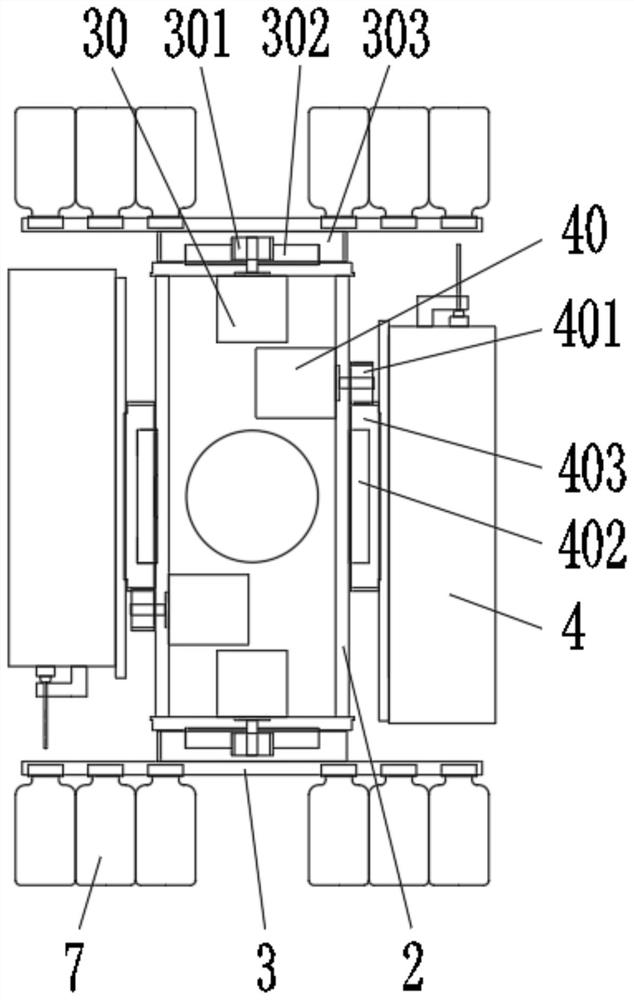
[0025] A multi-dimensional dispensing robot includes: a bracket 1, a main frame 2, a vial fixing device 3 and an injection fixing device 4. The main frame 2 is rotatably arranged on the support 1 , and the rotation axis of the main frame 2 is a horizontal axis. The vial fixing device 3 and the injection fixing device 4 are respectively rotatably arranged on the main frame 2, and the rotation axis of the vial fixing device 3 and the rotation axis of the injection fixing device 4 are perpendicular to The rotation axis of the main frame 2, the rotation axis of the vial fixing device 3 and the rotation axis of the injection fixing device 4 are also perpendicular to each other. The vial fixing device 3 has a plurality of vial clamping jaws 31 for fixing and clamping the vial 7 , and the plurality of vial clamping jaws 31 are distributed around the rotation axis of the vial fixing device 3 . The injection fixture 4 is provided with a syringe 41 and an injection movement driving dev...
Embodiment 2
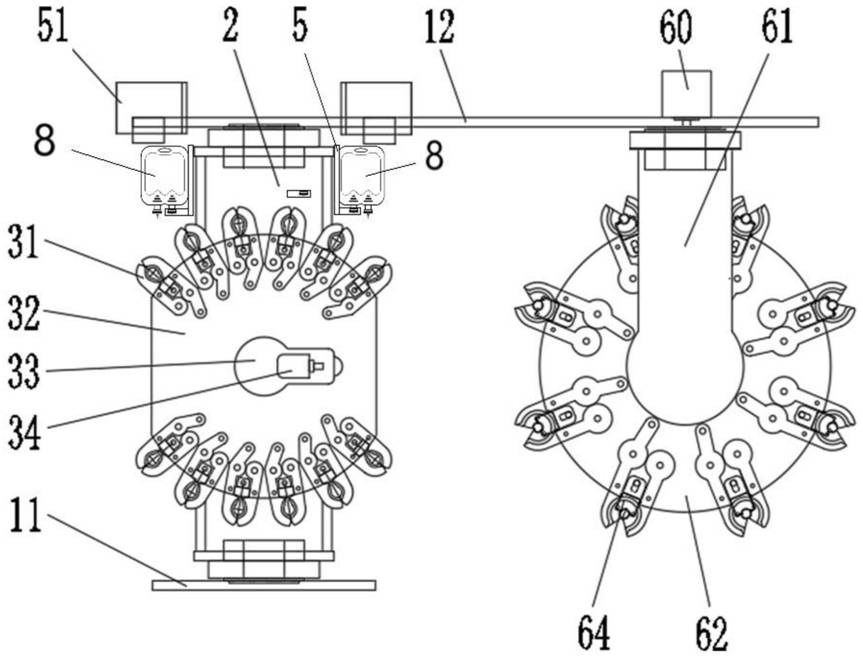
[0035] A multi-dimensional dispensing robot, on the basis of Embodiment 1, also includes a spare solvent holder 5 for fixing and placing a solvent bag 8, and a needle pulling device 51. There are four spare solvent supports 5, and two pairs of the spare solvent supports 5 are fixedly installed on both sides of the main frame 2, and the spare solvent supports 5 are corresponding to the transposition of the syringe 41 on the same-side injection fixture 4 Specifically, two spare solvent holders 5 are radially distributed around a syringe fixing device 4, which can correspond to different angles of rotation of the injection fixing device 4 respectively. The spare solvent holder 5 includes a solvent jaw and a solvent bracket. When the injection fixture 4 rotates to a certain angle, the needle of the syringe 41 on the injection fixture 4 can correspond to the solvent bag 8 on one of the spare solvent holders 5, so as to extract the solvent on the spare solvent holder 5 The medicina...
Embodiment 3
[0037] A multi-dimensional dispensing robot, on the basis of Embodiment 1 or Embodiment 2, also includes a solvent fixing device 6; the solvent fixing device 6 is rotatably arranged on the rear support plate 12, and the solvent fixing device 6 The rotation action of the fixed disk support drive motor 60 is controlled by the solvent belt transmission mechanism, and the fixed disk support drive motor 60 and the solvent belt transmission mechanism form a solvent rotation drive device.
[0038] The solvent fixing device 6 includes a fixing disc bracket 61, a solvent clamping jaw fixing disc 62, a solvent transposition driving device 63 and a solvent clamping jaw 64 (solvent bag / bottle clamping device). The fixed disk support 61 is rotatably disposed on the rear support plate 12 , and the solvent jaw fixed disk 62 is rotatably disposed on the fixed disk support 61 . There are multiple solvent jaws 64 , all of which are fixed on the solvent jaw fixing plate 62 , and the solvent jaws...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More