

Motion control method suitable for exoskeleton robots
An exoskeleton robot and motion control technology, which is applied in the direction of program control manipulators, applications, manipulators, etc., can solve the problems of inability to adjust the step length, single motion mode, and inability to adjust the motion, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
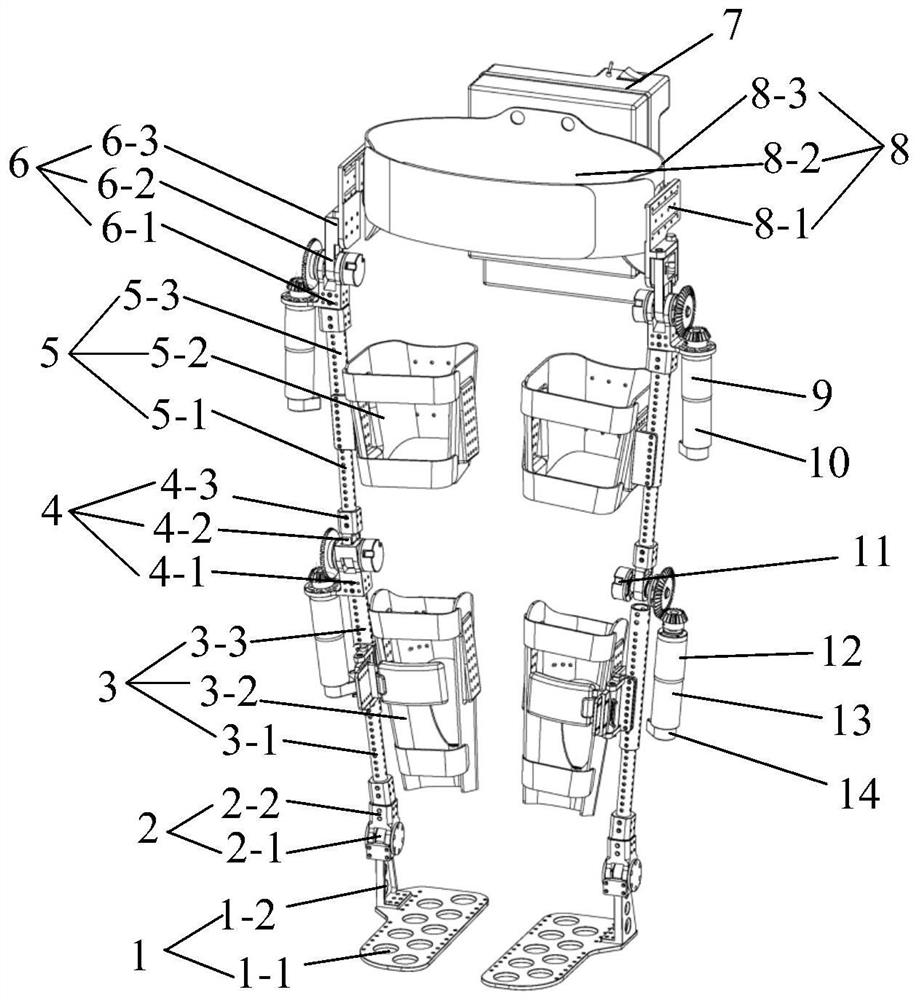
[0126] This embodiment provides a motion control method capable of realizing automatic recognition of the movement intention of the exoskeleton robot, specifically: the walking finite state machine of the exoskeleton robot is preset to include: the half-step swing state of the right leg (state 1), Half-step swing state of the left leg (state 2), swing state of the right leg (state 3), state of double-leg support with right leg in front (state 4), swing state of left leg (state 5), state of double-leg support with left leg in front (state 6) and standing state. Each state is defined as a series of joint reference trajectories, and the transition between states needs to meet some state transition conditions such as thresholds. In the right leg half-step swing state, the right leg swings half a step, which is used to transition from standing to starting walking or ending walking to standing; the left leg is in the support phase, and both crutches are in contact with the ground. ...
Embodiment 2
[0179] This embodiment provides a motion control method capable of realizing online adjustment of the walking step length of the exoskeleton robot, specifically: the walking finite state machine of the exoskeleton robot is preset to include: the half-step swing state of the right leg, the half-step swing state of the left leg Step swing state, right leg swing state, right leg in front double leg support state, left leg swing state, left leg in front double leg support state and standing state. The details are the same as those in Embodiment 1, and will not be repeated here.
[0180] The motion control method includes the steps of:
[0181] Step S201, exercise information acquisition steps:
[0182] The angle and ground reaction force information of each part of the exoskeleton robot are collected in real time.
[0183] Step S202, step size adjustment data calculation steps:
[0184] In the process of walking, according to the collected angle and ground reaction force inform...
Embodiment 3
[0199] This embodiment provides a motion control method that can realize the automatic recognition of the motion intention of the exoskeleton robot and the online adjustment of the walking step length, specifically:
[0200] The walking finite state machine of the exoskeleton robot is preset to include: the half-step swing state of the right leg, the half-step swing state of the left leg, the swing state of the right leg, the support state of the right leg in front, the swing state of the left leg, and the swing state of the left leg. Legs in the front legs support state and standing state. The details are the same as those in Embodiment 1, and will not be repeated here.
[0201] The motion control method includes the steps of:
[0202] Step S301, exercise information acquisition steps:
[0203] The angle and ground reaction force information of each part of the exoskeleton robot are collected in real time.
[0204] Step S302, calculation steps of the ground pressure center...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More