Grabbing robot equipment with silicon wafer transportation and dust removal functions
A technology of silicon wafers and robots, applied in manipulators, manufacturing tools, program-controlled manipulators, etc., to prevent dust from spreading and avoid secondary pollution
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
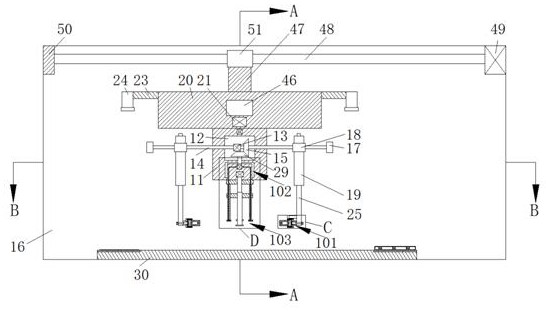
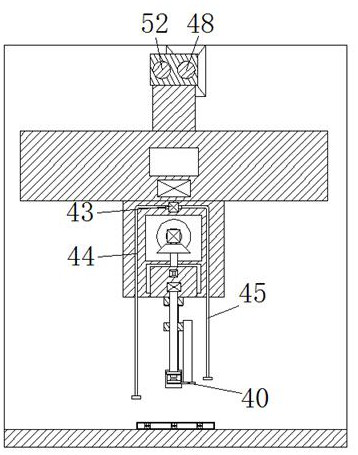
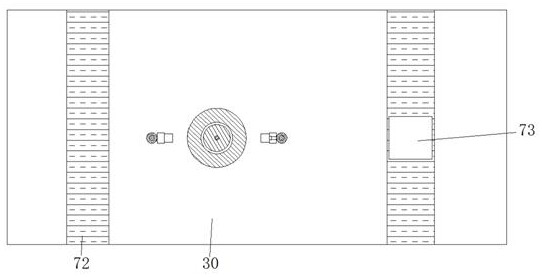
[0021] Combine below Figure 1-Figure 6 The present invention is described in detail, and for convenience of description, the orientations mentioned below are now stipulated as follows: figure 1 The up, down, left, right, front and back directions of the projection relationship itself are the same.
[0022] A robot grabbing device with the functions of transporting and removing dust for silicon wafers according to the present invention includes a main body 11, and a working area 16 is arranged outside the main body 11, and the main body 11 can move left and right in the working area 16 , the main body 11 is provided with a linkage chamber 12, and a linkage motor 13 is fixed in the linkage chamber 12. The left and right ends of the linkage motor 13 are symmetrical and the power connection is provided with a rotating rod 14, and the rotating rod 14 on the right side The outer circular surface is fixed with a driving bevel gear 15 in the linkage cavity 12, and the ends of the ro...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More