

Forward fusion system and method for advanced driving assistance
A technology of driving assistance and fusion method, which is applied in the field of ADAS, can solve the problems of large delay, network quality dependence, and no sensor target detection information fusion, etc., to achieve small delay time, enhanced accuracy, stable and smooth target output Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0043] The present invention will be further described below in conjunction with specific embodiments. It should be understood that the following examples are only used to illustrate the present invention but not to limit the scope of the present invention.
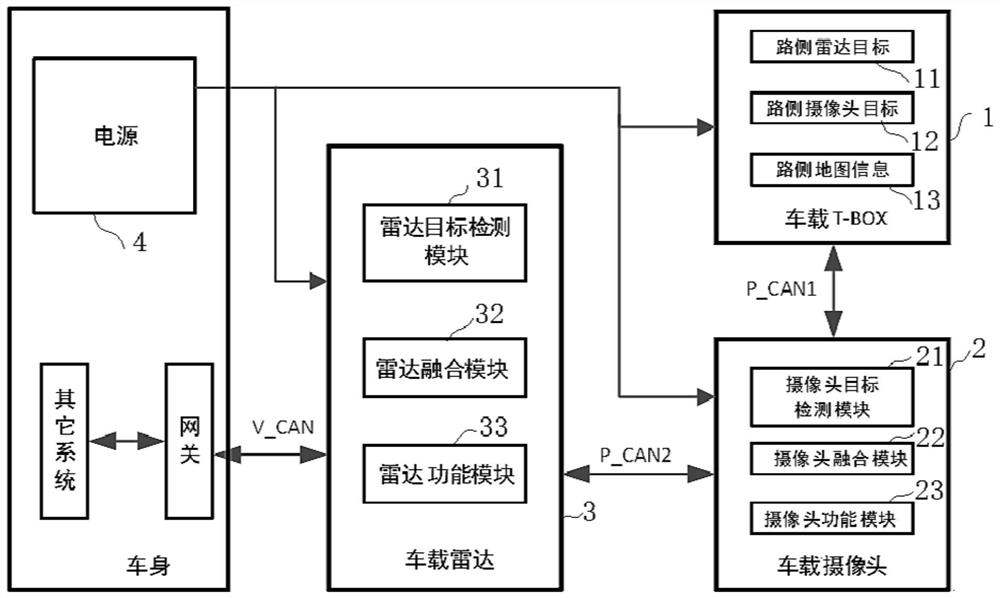
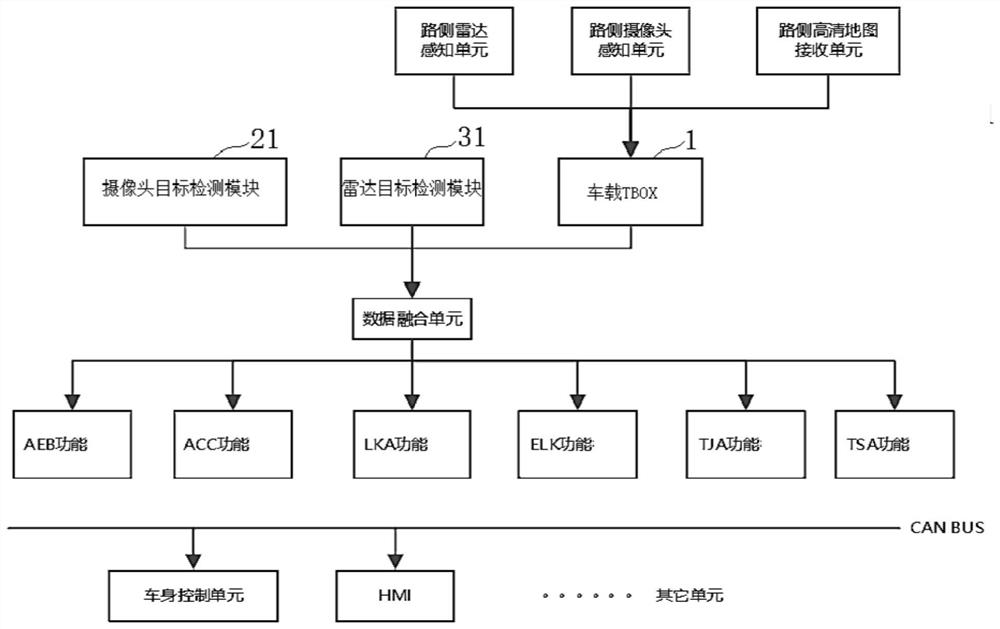
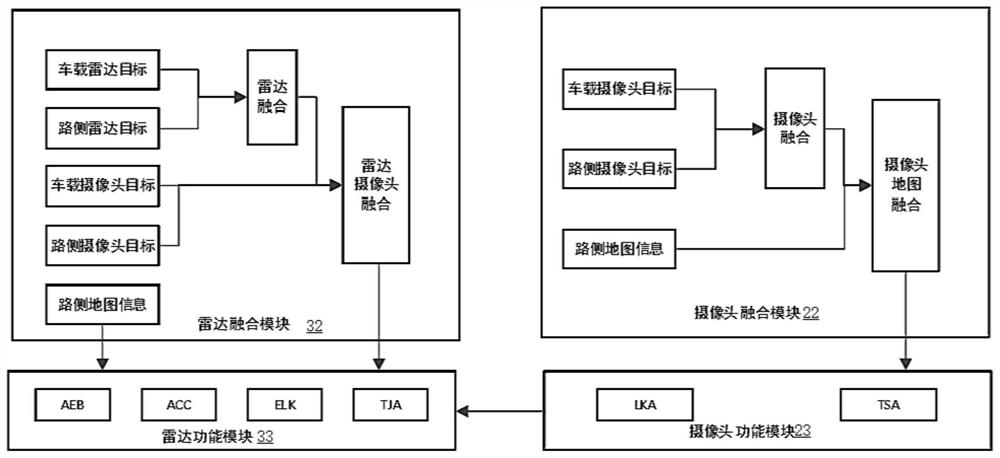
[0044] Such as Figure 1-Figure 2 Shown is a forward fusion system for advanced driver assistance according to one embodiment of the present invention. The forward fusion system of the advanced driving assistance includes a vehicle-mounted TBOX 1, a vehicle-mounted camera 2 and a vehicle-mounted radar 3 connected in sequence, and a vehicle body power supply 4 that is electrically connected to the vehicle-mounted TBOX 1, the vehicle-mounted camera 2 and the vehicle-mounted radar 3. The power supply 4 is set to supply power to the vehicle-mounted TBOX 1, the vehicle-mounted camera 2 and the vehicle-mounted radar 3.
[0045] The vehicle-mounted TBOX 1 is a roadside information receiving unit TBOX, which is installed behind...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More