

Multi-unmanned-aerial-vehicle formation consistency control method based on event-triggered communication
An event-triggered, multi-UAV technology, applied in non-electric variable control, control/regulation systems, 3D position/channel control, etc. The effect of improving communication anti-interference ability and reliability, reducing network traffic and improving computing power
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
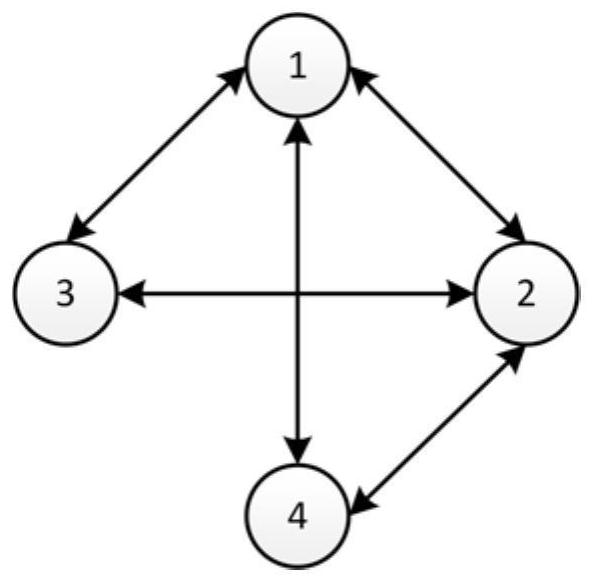
[0059] Taking the number of drones N=4 as an example, the specific implementation of the event-triggered consistency control algorithm is described. First, before implementing the consensus control algorithm, a communication network needs to be established for the UAV. The consensus algorithm realizes the consistent state of multiple agents by generating control instructions in a distributed manner. Obviously, the agent obtains the state information of other agents through communication is the premise of achieving consensus control. The communication topology will affect the stability of the consensus algorithm, and the matrix theory of the graph can clearly describe the system communication topology. The communication connection relationship among the four UAVs is as follows: figure 1 As shown, the double-headed arrows indicate the two-way communication between UAVs. The Laplacian matrix describing the communication topology is:
[0060]
[0061] By analyzing the Laplac...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More