

Parallel connection jade pasting manipulator control system and method
A control method and manipulator technology, applied to manipulators, program-controlled manipulators, manufacturing tools, etc., can solve problems such as the inability of parallel manipulators to position the mattress, the difficulty of controlling parallel manipulators, and the difference in the number and position of jade, so as to reduce kinematic calibration Requirements, shorten the system development cycle, and control the effect of fast response
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0031] The technical solution of this patent will be further described in detail below in conjunction with specific embodiments.
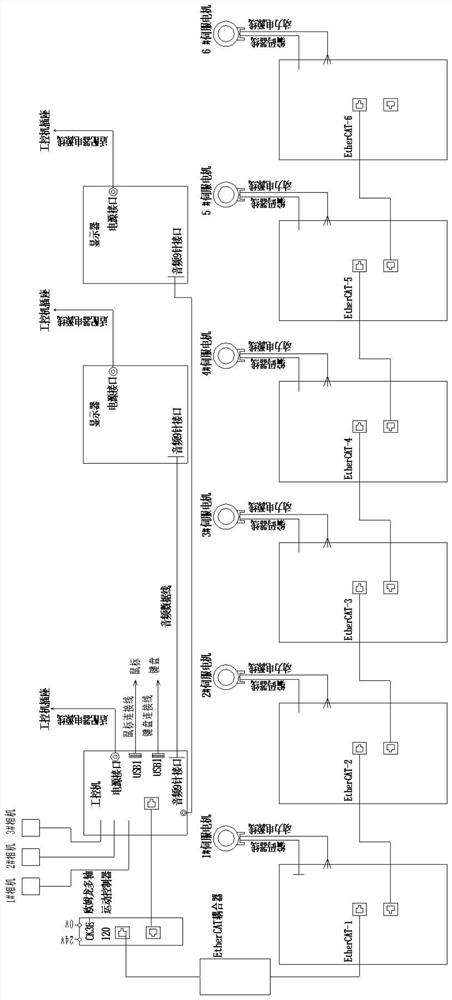
[0032] see Figure 1-2 , a parallel control system for embedding jade manipulators, including an industrial computer, a motion controller, an EtherCAT coupler, a servo driver, and a servo motor;
[0033] The industrial computer is used for system overall scheduling and human-computer interaction, and is connected with a display 1 for displaying the system human-computer interaction interface; specifically, the model of the industrial computer is Advantech AIMC-2000;
[0034] The industrial computer is also connected with an industrial camera and a display 2 for visual detection and display of the mattress position; specifically, the industrial camera is a Shunhuali 2 million USB industrial camera;
[0035]The motion controller is the control center of the parallel manipulator, responsible for running the PLC program and the parallel manipulator mo...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More