

A Vision-Inertial Integrated Navigation Method for Aircraft Precision Approach and Landing
A navigation method and an inertial combination technology, which is applied in navigation, navigation, surveying and navigation through velocity/acceleration measurement, can solve the problems of inability to estimate attitude and velocity information, limited camera frame rate, and inability to meet pose state estimation needs and other issues to achieve the effect of autonomous navigation capabilities
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0051] The present invention is described in detail below in conjunction with the accompanying drawings and specific embodiments.
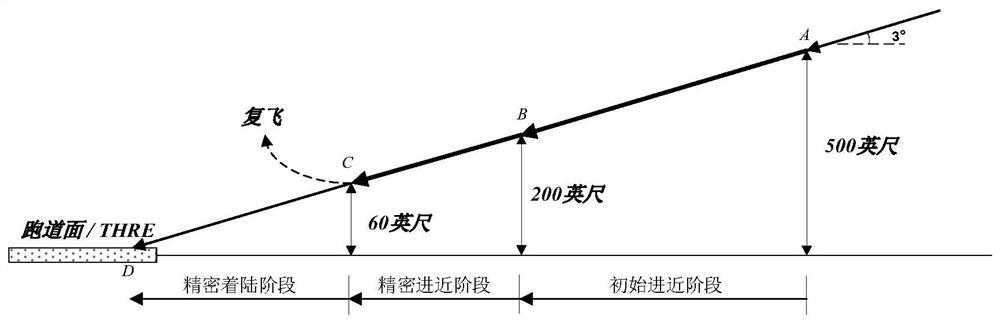
[0052] The present invention provides a visual - inertial combined navigation method for precision approach landing of aircraft, the method is to divide the entire approach landing process into three stages: the initial approach stage, the precision approach phase and the precision landing phase, for different stages of navigation by different methods. as Figure 2 As shown, the initial approach phase refers to the stage in which the aircraft descends from a flight altitude of 500 feet to 200 feet, the precision approach phase refers to the stage in which the aircraft descends from a flight altitude of 200 feet to 60 feet, and the precision landing phase refers to the stage in which the aircraft descends from a flight altitude of 60 feet to the runway surface.
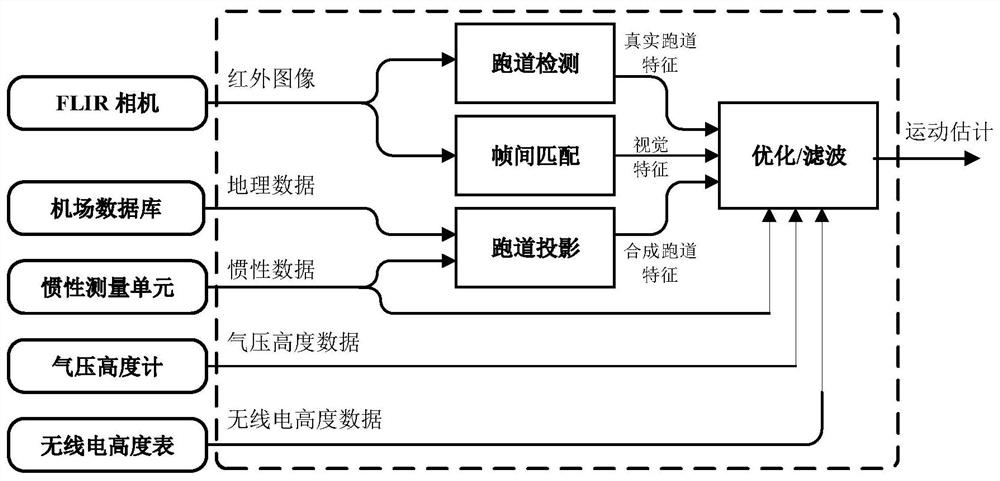
[0053] The input data of this method comes from the infrared image taken by the airborne for...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More