

Needle holder for intelligent guidance of percutaneous puncture minimally invasive surgery
A minimally invasive surgery and needle holder technology, applied in puncture needles, surgical navigation systems, surgery, etc., can solve the problems of patient discomfort, puncture surgery accuracy error, and unstable navigation accuracy, so as to achieve good vision and improve accuracy speed, damage avoidance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0019] The technical solutions of the present invention will be described in detail below in conjunction with the accompanying drawings and preferred embodiments.
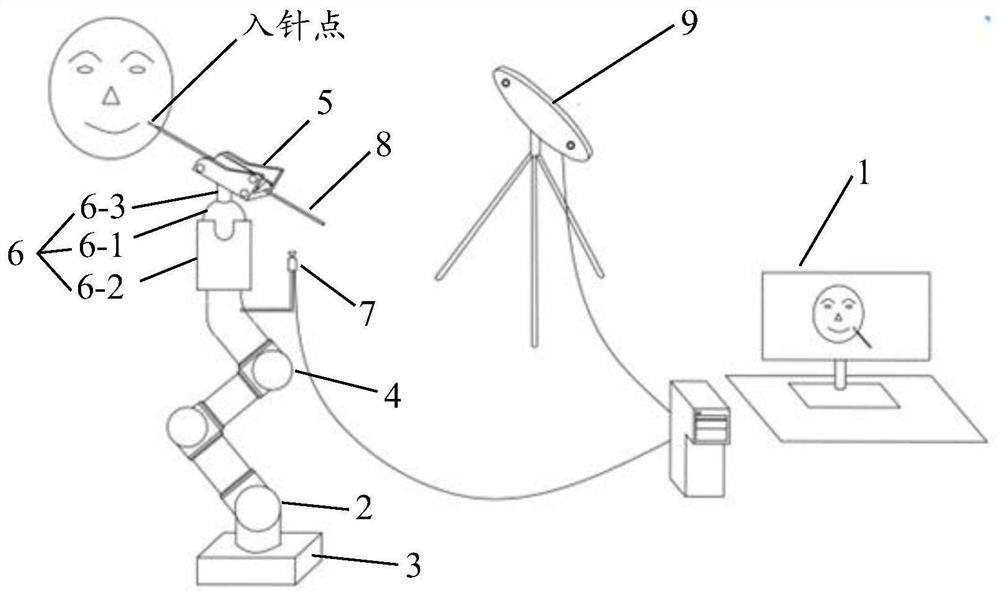
[0020] In one of the examples, as Figure 1-4 As shown, the present invention discloses a needle holder for intelligent guidance of percutaneous minimally invasive surgery. The needle holder includes a positioning robot arm, a puncture guiding device, an optical tracking system and a data processing system 1 .
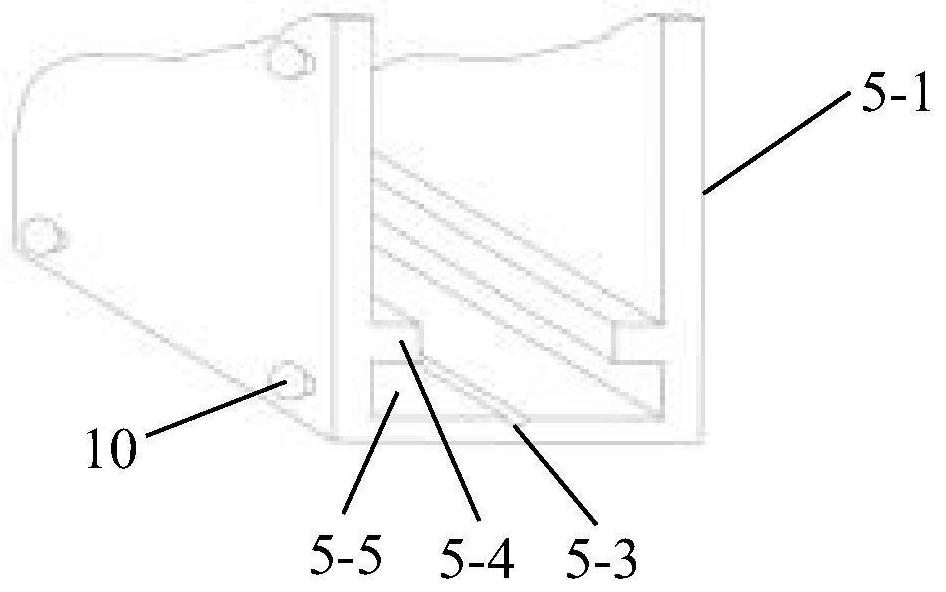
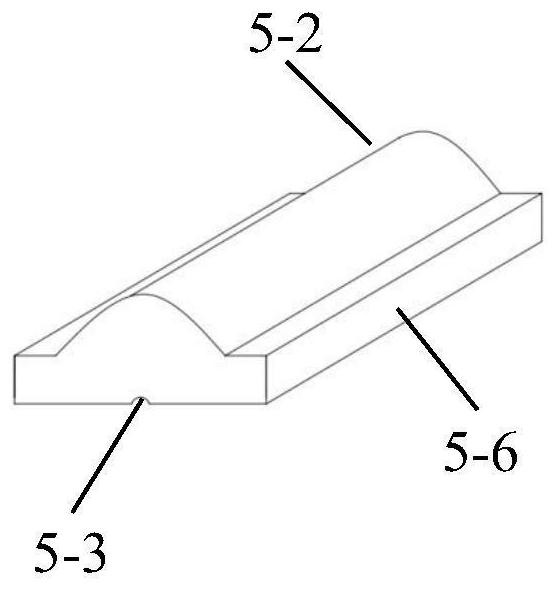
[0021] Specifically, the positioning robot arm includes three joints, respectively the first joint 2, the second joint and the third joint 4, wherein the end of the first joint 2 is fixedly connected to the base fixing device 3, and the end of the third joint 4 is connected to the puncture The guiding device is fixedly connected. Further, the positioning robot arm in this embodiment is a five-degree-of-freedom robot arm, which is convenient for the surgeon to roughly align the metal puncture frame 5 with t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More