

Flying wing unmanned aerial vehicle large overload steady disk maneuvering control method
An unmanned aerial vehicle, high overload technology, applied in the field of aviation flight control, to achieve the effect of simplifying the design work and clear control logic
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0044] The large overload stabilization maneuver control method of the flying-wing unmanned aerial vehicle of the present invention includes the stabilization maneuver control logic and the closed-loop control mode of the engine gauge speed, the altitude maintenance control mode, and the roll angle control mode;
[0045] The logic of the maneuvering control for stabilizing the plate is as follows:
[0046] Stable and level flight before the stable slope is established, vertically call the altitude hold mode, and the altitude control target is the current altitude; horizontally call the roll angle hold mode; the engine calls the gauge speed closed-loop control mode, and the control target is the current gauge speed;
[0047] Steady maneuver stage: vertically call the altitude hold mode, and the height control target is the altitude when entering the steady maneuver; laterally call the roll angle hold mode, and the roll angle control target is the proposed set value; the engine c...
Embodiment 2
[0053] The maneuvering control method of the flying-wing unmanned aerial vehicle with large overload of the present invention includes the method of calling the control law mode of the maneuvering control process of the stabilizing plate, the closed-loop control mode of the engine speed, the altitude maintenance control mode, and the roll angle control mode:
[0054] ① Steady maneuvering control logic
[0055] Stabilize and level flight for 2 seconds before establishing a stable slope, call the altitude hold mode vertically, and the altitude control target is the current altitude; call the roll angle hold mode horizontally, and the roll angle command is 0°; call the closed-loop control mode of the engine speed, and control the target is the current gauge speed.
[0056] Steady maneuvering stage: call the altitude hold mode vertically, and the altitude control target is the height when entering the steady maneuver; call the roll angle hold mode laterally, and the roll angle con...
Embodiment 3
[0073] When the UAV of the present invention is flying, the longitudinal control mode, the lateral control mode, the engine control mode, and the course control mode need to be called at the same time, and the course in the present invention always calls the stabilization control mode.
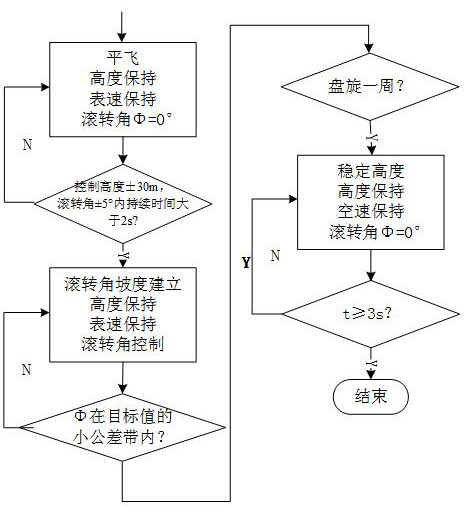
[0074] Such as figure 1 As shown, the main flow of the modal scheduling logic is:
[0075] The first stage: first switch from the current state to the level flight state, that is, vertically call the altitude control mode, and the control target is the height before turning to the level flight state; the engine control calls the airspeed control mode, and the control target is to turn to the level flight state The airspeed before the state; the roll angle control mode is called laterally, and the control target is 0°;
[0076] The second stage: establish the roll slope, when the flying height of the aircraft enters the tolerance zone of the given height ±30m (should be selected according to t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More