

Unmanned aerial vehicle image acquisition method
A technology of image acquisition and UAV, which is applied in the field of UAV, can solve the problems of low image definition and low precision of UAV image acquisition system, and achieve the effect of improving accuracy and definition and improving precision
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
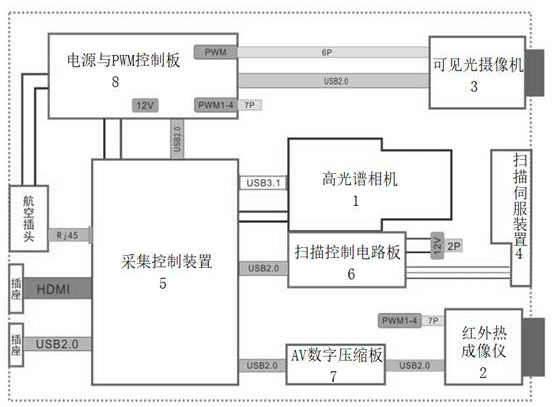
[0046] This embodiment provides a UAV image acquisition system, such as figure 1 and 2 shown, including:
[0047] The hyperspectral camera 1 is connected with the acquisition control device 5, and is used to complete the acquisition of the two-dimensional geometric space and one-dimensional spectral information of the target under the motion of the scanning servo device 4, and the acquisition control device 5 collects the hyperspectral resolution obtained in real time. Continuous, narrow-band image data at a high rate;
[0048] The infrared thermal imager 2 is connected with the acquisition control device 5, and is used to complete the acquisition of the infrared thermal image of the target under the movement of the scanning servo device 4, and the acquisition control device 5 collects the infrared thermal image data obtained in real time;
[0049] The visible light camera 3 is connected with the acquisition control device 5, and is used to complete the acquisition of the vi...
Embodiment 2
[0069] This embodiment provides a UAV image acquisition method, which is applied to the UAV image acquisition system in Embodiment 1. The UAV image acquisition method is stored and executed on the acquisition control device 5, and specifically includes the following steps:
[0070] S1. Judging whether the information including that the drone has flown to the first preset position has been received; according to factors such as the site selection of the shooting task, the hyperspectral camera 1, the infrared thermal imager 2 and the visible light camera 3 and other factors, the first A preset position is selected at a position where the infrared thermal imager 2 and the visible light camera 3 can distinguish the target shape;
[0071] S2. When receiving information that the drone has flown to the first preset position, generate a signal to control the infrared thermal imager 2 or the visible light camera 3 to take photos of a preset size according to the day and night conditions...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More