

Attitude cooperative tracking control method for distributed spacecraft
A tracking control and spacecraft technology, which is applied in the field of multi-spacecraft formation flight, can solve the problems of unknown change degree of spacecraft rotational inertia, spacecraft attitude control system control input saturation, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
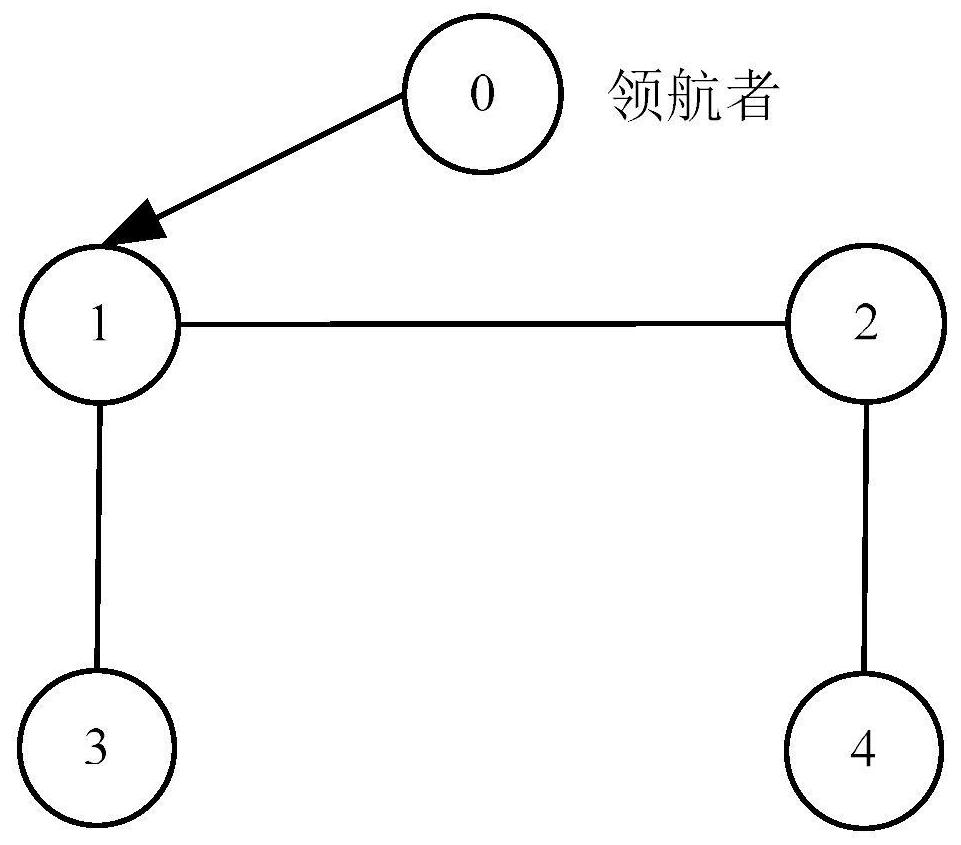
[0083] Taking a formation system consisting of 4 follower spacecraft and 1 leader as the research object, figure 2 A directed communication topology is given, including 4 follower spacecraft (marked as nodes 1, 2, 3, 4) and 1 leader (marked as node 0), it can be seen that only the first spacecraft The device can obtain the information of the navigator.
[0084] Leader trajectory: ω 0 =[0.1sin(0.2t),0.1cos(0.2t),0.1cos(0.5t)] T , and It can be obtained by kinematic equation (1).
[0085] The specific parameters of the four following spacecraft are as follows:
[0086] Table 1. Spacecraft inertia matrix and initial attitude
[0087]
[0088] Enter a saturation value of τ 1max =[3,1,2] T Nm, τ 2max =[4,2,2] T Nm, τ 3max =[2,3,2] T Nm, τ 4max =[4,2,2] T Nm. external disturbance i =(0.5+||ω i || 2 )[0.02sin(t),0.05cos(t),0.03cos(t)] T , i=1,2,3,4. The initial value of the observer state and adaptive parameters is σ i (0)=[0,0,0] T , ρ i (0)=[0,0,0] T...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More