

Three-D parallel translation mechanism for virtual axle NC machinetool, robot and mechanical measurer
A technology of CNC machine tools and virtual axes, applied in the directions of manipulators, metal processing machinery parts, automatic control devices, etc., can solve the problems of complex error analysis and correction, simple structure, small working space, etc., and achieve simplified positive solutions and correction compensation analysis problems. , the mechanism is simple, the rigidity is good
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
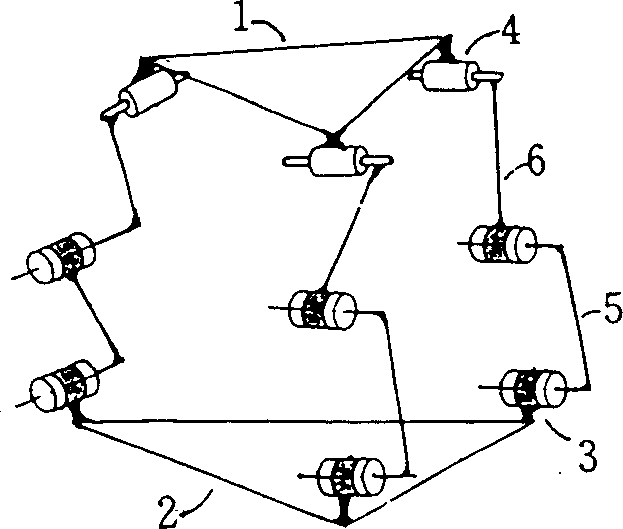
[0026] attached Figure 8 Shown is an embodiment of the invention applied to a virtual axis mechanical measuring machine. Install the measuring head (5) on the moving platform (1), install the measured workpiece (6) on the static platform (2) (base), and drive the three rotating pairs on the base (2) to control the moving platform The position of the upper measuring head (5) in space (three-dimensional movement) is completed to complete the specified measuring process. If will attach Figure 8 The measurement head (5) on the moving platform (1) is replaced by a manipulator gripper, which can also be regarded as an embodiment of the present invention for an assembly robot that only needs three-dimensional translation.
[0027] In a word, the present invention provides a new model with the above-mentioned characteristics for virtual axis CNC machine tools, walking (including crawling, wall climbing, etc.) robots, industrial robots (such as assembly and stacking robots) and vir...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More