

Environment sensing system based on laser radar
A lidar and environmental perception technology, applied in the field of lidar-based environmental perception systems, can solve problems such as confusion, poor lighting conditions, and insufficient computing efficiency of far-infrared camera detection and tracking algorithms to be used in real time, to save computing resources. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0054] The following will clearly and completely describe the technical solutions in the embodiments of the present invention with reference to the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only some, not all, embodiments of the present invention. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without making creative efforts belong to the protection scope of the present invention.
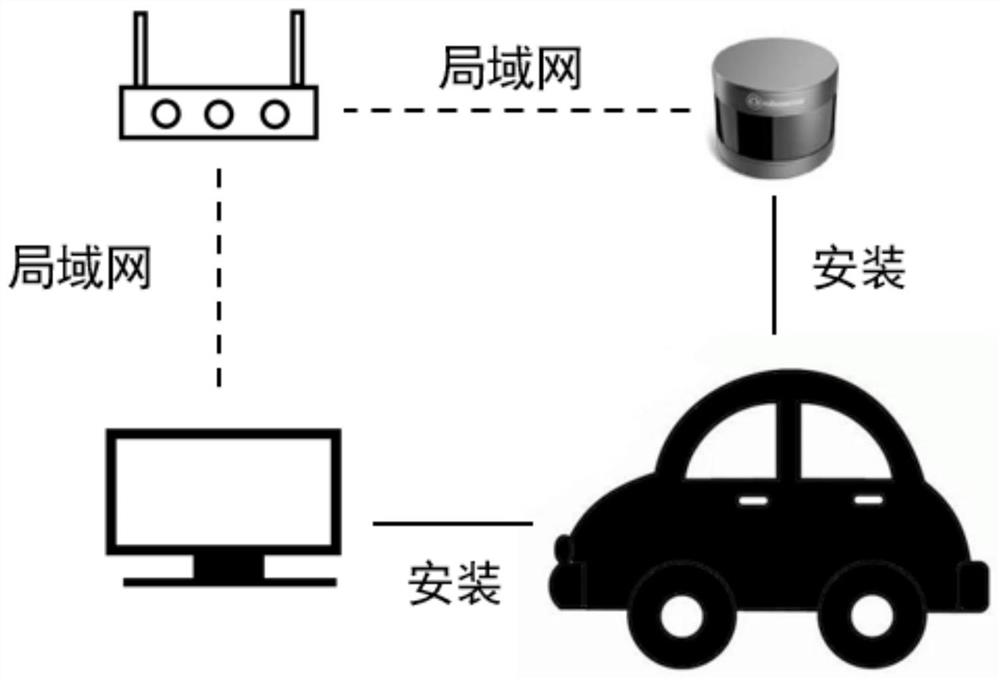
[0055] Such as Figure 1-2 As shown, the embodiment of the present invention provides a technical solution: a lidar-based environment perception system, including lidar, self-driving cars and computers, and the rigid connection between the lidar and the self-driving car, in order to obtain more road information ahead In this paper, the laser radar is generally installed in front of the car. The data between the laser radar and the computer is transmitted throu...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More