Magnetic control shape memory alloy actuator displacement control method
A memory alloy and displacement control technology, which is applied in the direction of adaptive control, general control system, control/regulation system, etc., can solve the problem of complex hysteresis dynamic characteristics of magnetically controlled shape memory alloy actuators, restricting applications, and difficulty in achieving satisfactory control by control methods Effect and other issues
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
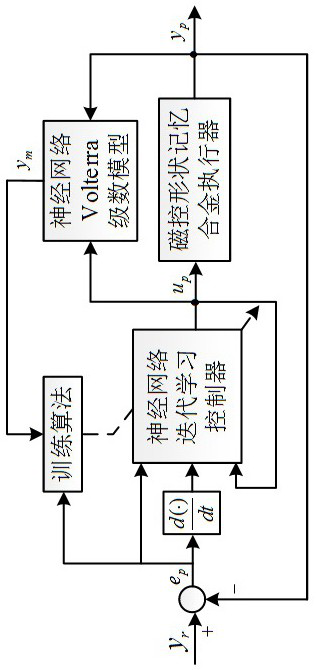
[0050]A method for controlling the displacement of a magnetically controlled shape memory alloy actuator based on neural network iterative learning control provided by the present invention is characterized in that it comprises the following steps:
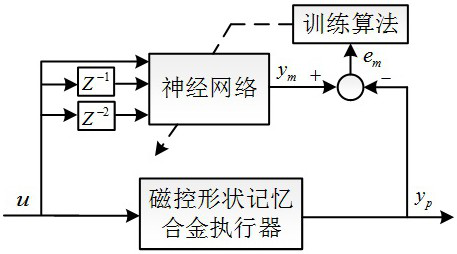
[0051] Step 1: Establish a Volterra series model that can describe the rate-dependent hysteresis nonlinearity of the magnetically controlled shape memory alloy actuator, and use the neural network to construct the kernel function of the Volterra series;
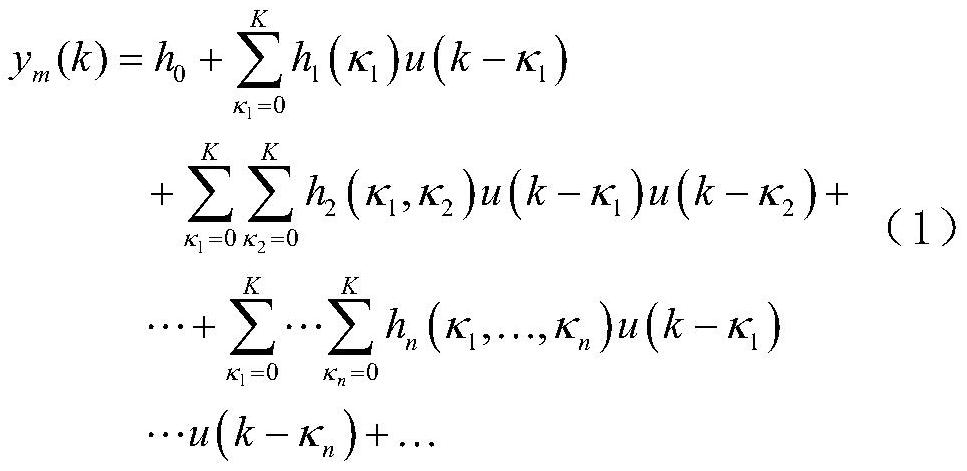
[0052] The expression of the Volterra series model is:
[0053]
[0054] Among them, k=0,1,...,N-1 is the discrete time, N is the expected time length and is a positive integer, n is the order of the model, p is the number of iterations, u p (k) and is the input and output values of the model at the pth iteration, h n (κ 1 ,...,κ n ) and K is the nth order kernel function and memory length of the model, κ n is the memory delay corresponding to the nth item.
[0055] C...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More