

Trace dynamic tracking implementation method
A technology of dynamic tracking and implementation method, applied in the field of robotics, can solve problems such as low efficiency, increased trajectory curvature, and small PID tracking trajectory curvature
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0046] The present invention will be further described below in conjunction with accompanying drawing:
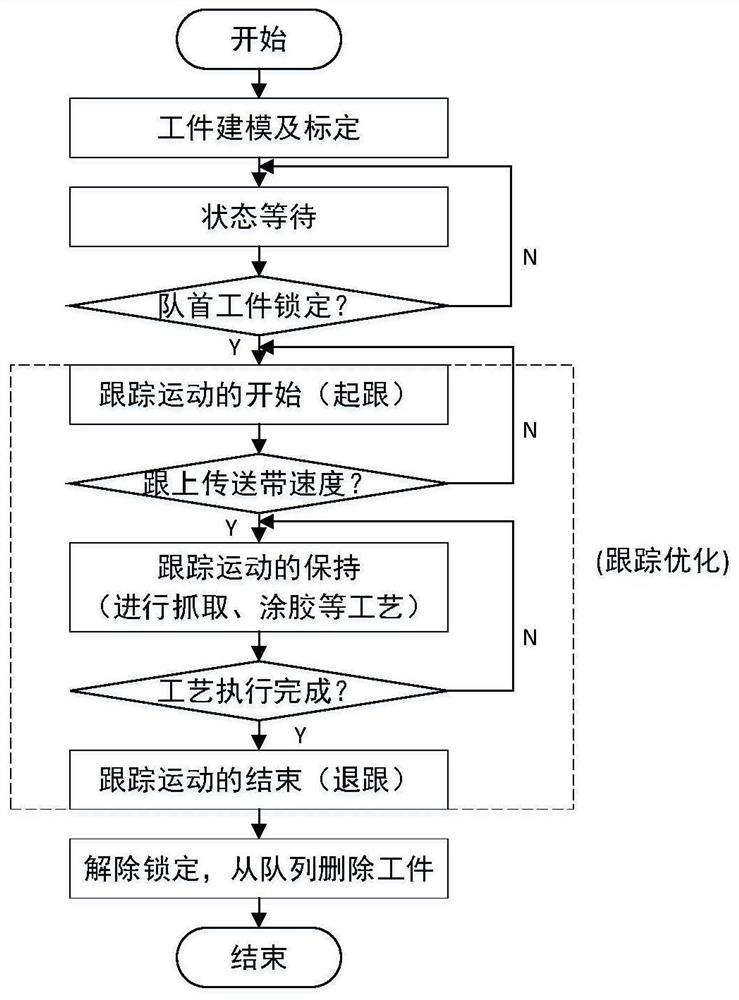
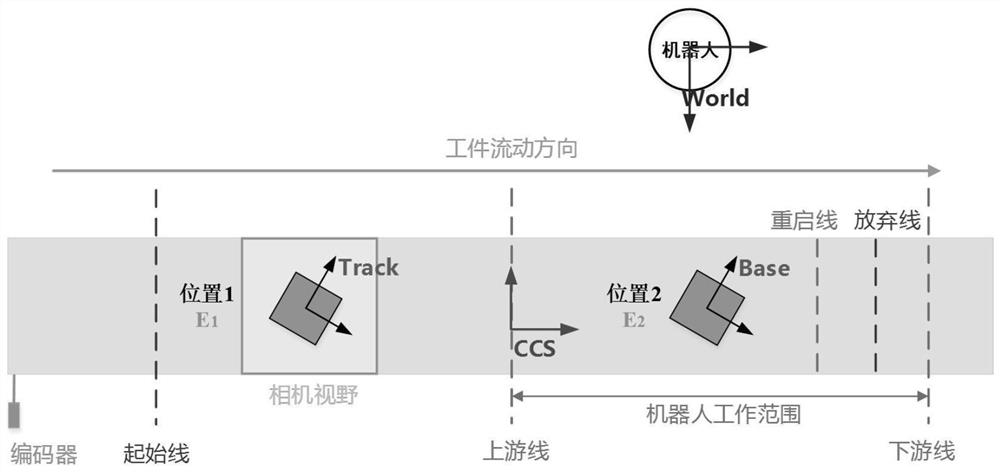
[0047] This embodiment will discuss the method of the robot tracking different process points on the moving workpiece, analyze the robot tracking motion process in detail and explain the calculation method of the coordinates of the interpolation points, and finally optimize the tracking effect to a certain extent. According to the dynamic control strategy, when there is a locked workpiece, the robot starts to track. First, it keeps up with the speed of the conveyor belt and keeps the workpiece relatively still. Then, it performs processes such as grasping and gluing on the moving workpiece. After processing, the tracking ends and the workpiece object is moved from removed from the queue. Robot tracking action flow such as figure 1 shown.
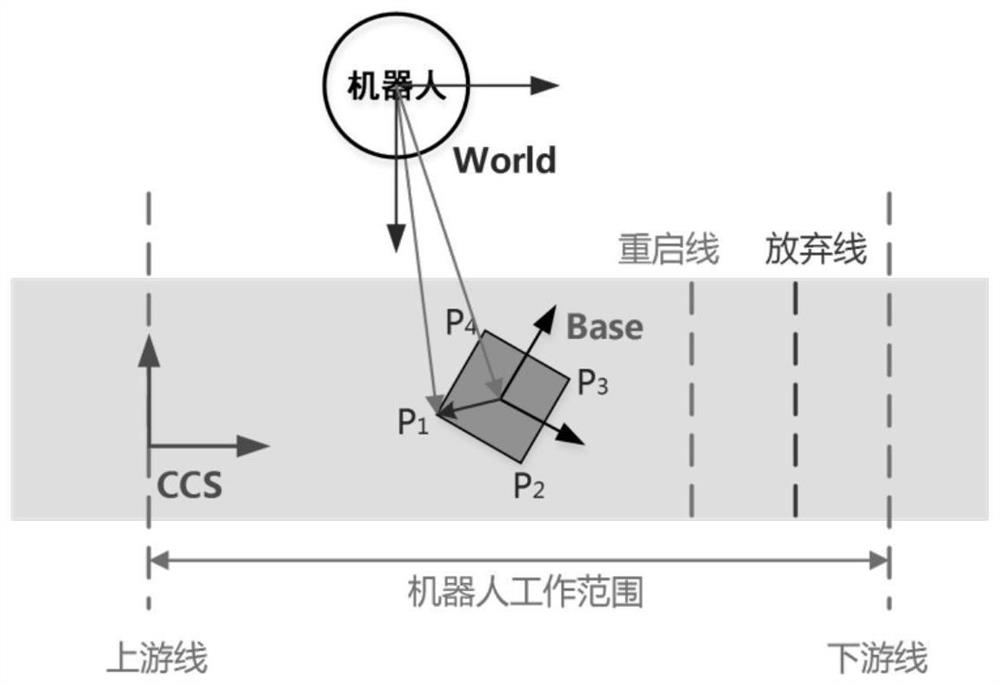
[0048] For the tracking of different process points with real-time changes in pose and pose, calibration of the workpiece reference co...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More