

Hydraulic system of quadruped robot based on two-stage energy supply and independent valve control of load port
A quadruped robot and hydraulic system technology, which is applied in the field of quadruped robot hydraulic system based on two-stage energy supply and independent valve control of the load port, can solve the problems of restricting the development and application of quadruped robots, low efficiency of quadruped robot hydraulic system, etc. problem, to achieve the effect of solving the coupling of import and export throttling effects, facilitating later maintenance and improving stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0017] The following will clearly and completely describe the technical solutions in the embodiments of the present invention with reference to the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only some, not all, embodiments of the present invention. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without making creative efforts belong to the protection scope of the present invention.
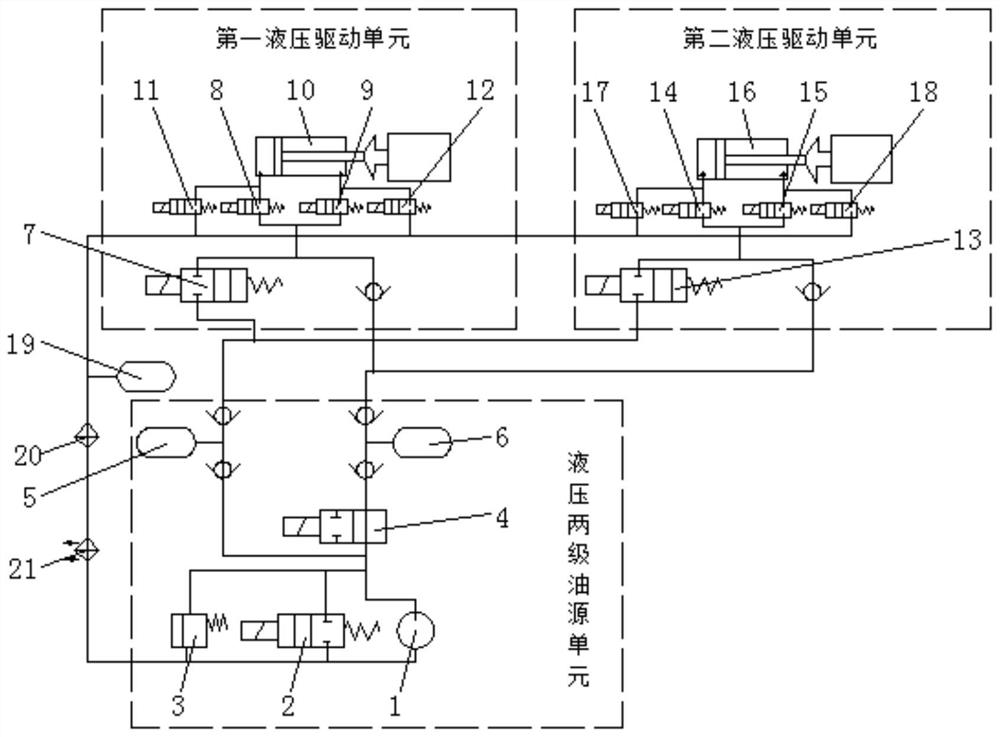
[0018] see figure 1 , a quadruped robot hydraulic system based on two-stage energy supply and independent valve control of the load port, characterized in that it includes a hydraulic two-stage oil source unit, a first hydraulic drive unit based on the independent valve control of the load port, and a second hydraulic drive unit. unit, the first hydraulic drive unit and the second hydraulic drive unit are connected to the hydraulic two-stage oil source unit th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More