

Three-dimensional plant cluster pruning method with cambered surface modeling
A pruning method and plant technology, applied in the field of intelligent control, can solve the problems of large pruning blind spots, difficult to meet the pruning range, single structure and function, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0113] Embodiment 1 describes an intelligent pruning robot.
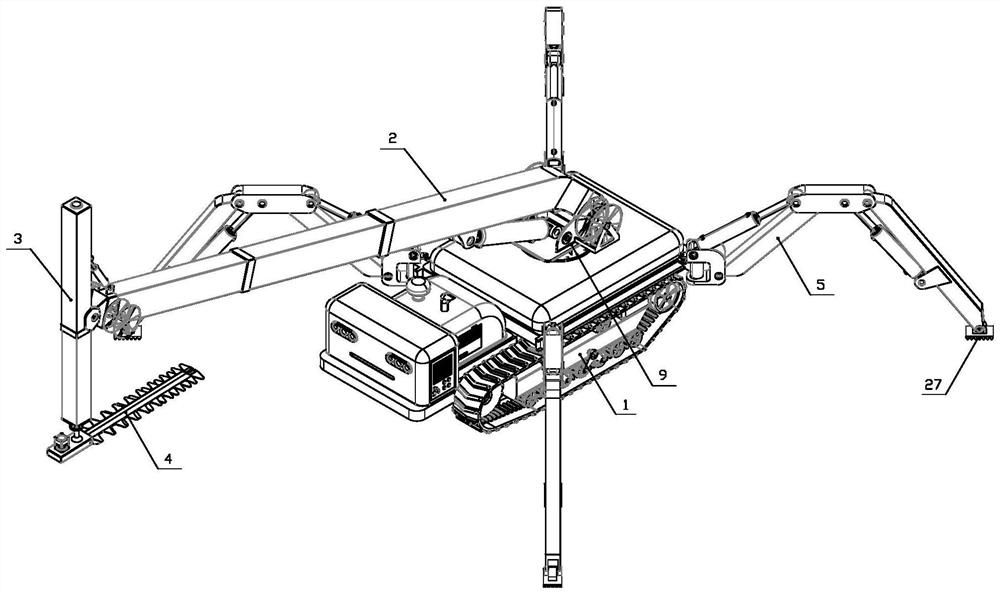
[0114] like figure 1 As shown, the intelligent pruning robot adopts a crawler-type structure, wherein the crawler-type pruning robot includes a crawler-type carrying chassis 1 , a main boom 2 , a sub-boom 3 , a pruning mechanism 4 and folding hydraulic legs 5 .
[0115] The crawler-type carrying chassis 1 is used to realize the walking of the crawler-type pruning robot.
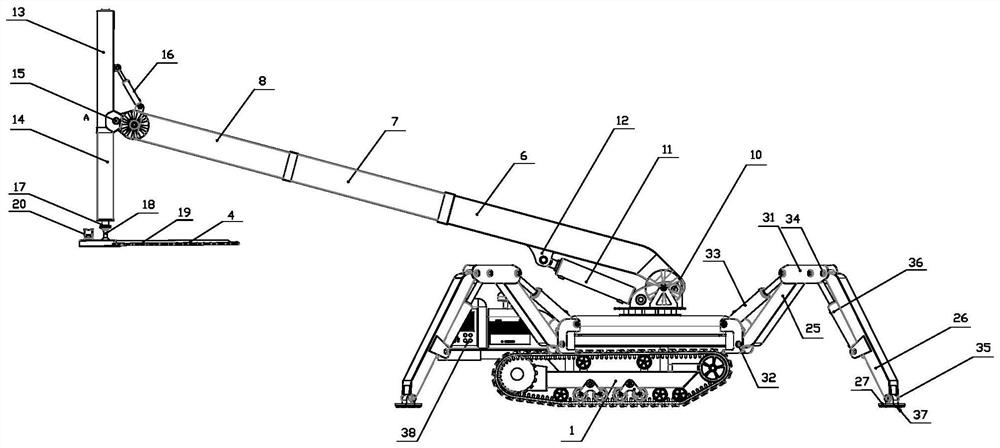
[0116] like figure 2 As shown, the main boom frame 2 adopts a length-extensible structure, that is, it includes a first-stage main arm 6, a second-stage main arm 7, and a third-stage main arm 8; wherein, the first-stage main arm 6, the second-stage main arm The arm 7 and the third-stage main arm 8 are nested in sequence.
[0117] A first telescopic mechanism is provided inside the main boom frame 2 to realize the extension and retraction of the second-stage main arm 7 and the third-stage main arm 8 .
[0118] Wherein, the first telescopic mech...
Embodiment 2
[0199] This embodiment 2 describes a three-dimensional plant cluster pruning method with an arc shape, which is realized based on the pruning robot in the above-mentioned embodiment 1. By intelligently controlling the pruning robot in the above-mentioned embodiment 1, it is beneficial to Realize the precise and efficient pruning of different shapes and different spatial levels in the three-dimensional plant clusters with curved shapes.
[0200] like Figure 11 Shown, a kind of three-dimensional plant cluster pruning method with arc shape, comprises the following steps:
[0201] I. The crawler-type pruning robot first runs and stops after arriving at the three-dimensional plant cluster place with the arc shape to be pruned.
[0202] II. Manually rotate each foldable hydraulic support leg 5 outward horizontally.
[0203] After the positioning pin hole 30 of each folding hydraulic support leg is aligned with the positioning pin hole 29 on the corresponding position of the crawl...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More