

Movable spinal operation supporting platform
A surgical platform and mobile platform technology, applied in the field of mobile spine surgery support platform, can solve the problems of reduced controllability, prolonged operation time, and higher control force requirements, so as to ensure physical strength and energy, accurate surgical operation, and precise movement. and the effect of positioning
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0024] The present invention will be described in further detail below in conjunction with the accompanying drawings and embodiments. Wherein the same components are denoted by the same reference numerals. It should be noted that the words "front", "rear", "left", "right", "upper" and "lower" used in the following description refer to the directions in the drawings, and the words "bottom" and "top "Face", "inner" and "outer" refer to directions toward or away from, respectively, the geometric center of a particular component.
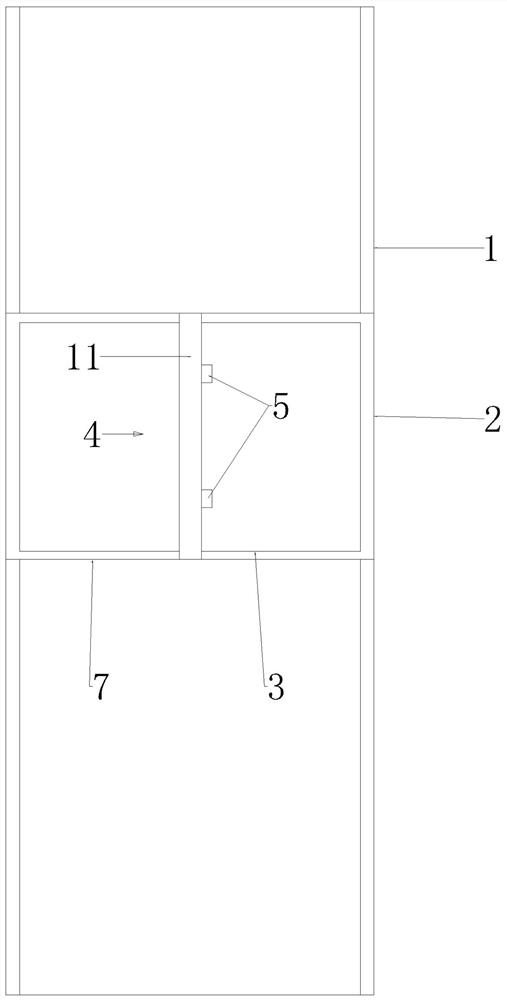
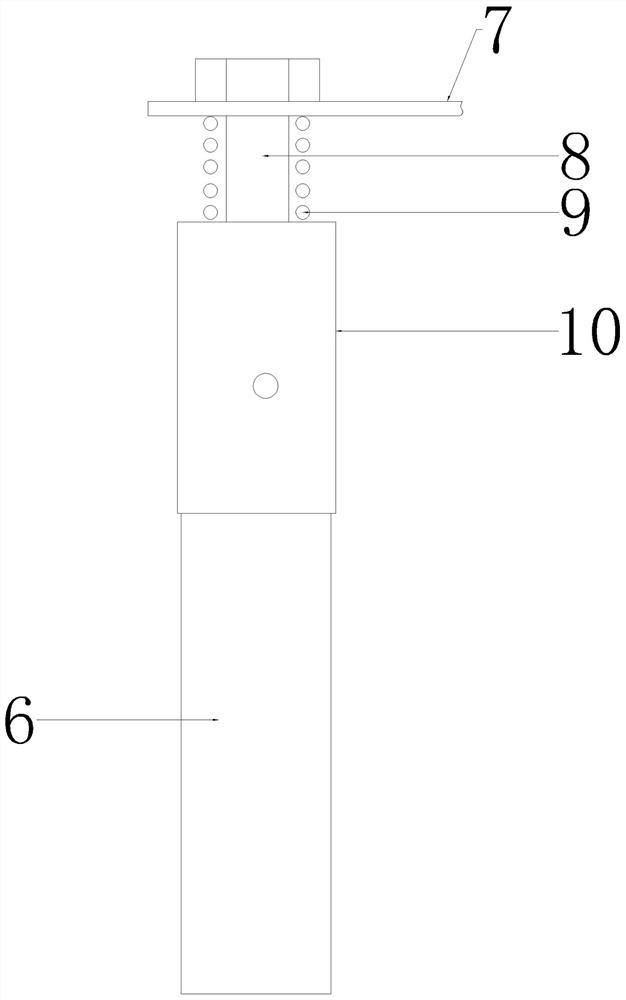
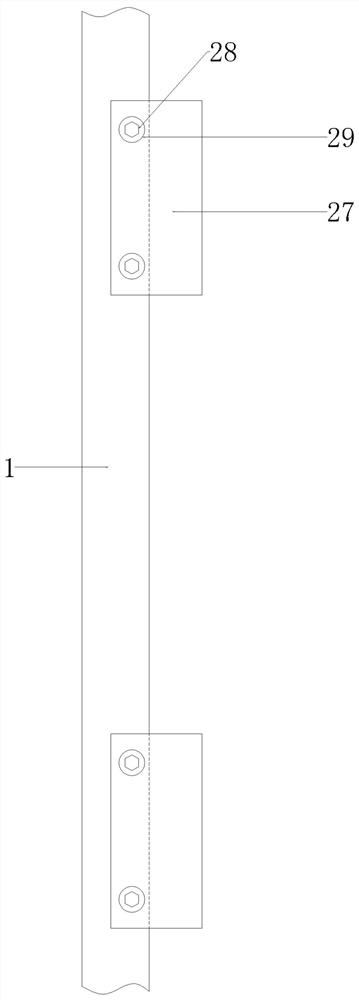
[0025] refer to Figure 1-6 As shown, the mobile spinal surgery support platform provided by the present invention includes longitudinal rails 1 arranged on both sides of the operating bed, an inverted U-shaped mobile platform 2 is erected on the longitudinal rail 1 and can slide along it, and the mobile platform 2 is configured with It can be locked on the first locking mechanism on the operating bed. The horizontal frame on the mobile platform 2 is ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More