

Signal processing method for underwater robot positioning system
An underwater robot and signal processing technology, which can be used in code division multiplexing systems, transmission systems, phase modulation carrier systems, etc., and can solve the problem of limited number of underwater robots.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0026] The following will clearly and completely describe the technical solutions in the embodiments of the present invention with reference to the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only some, not all, embodiments of the present invention. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without making creative efforts belong to the protection scope of the present invention.
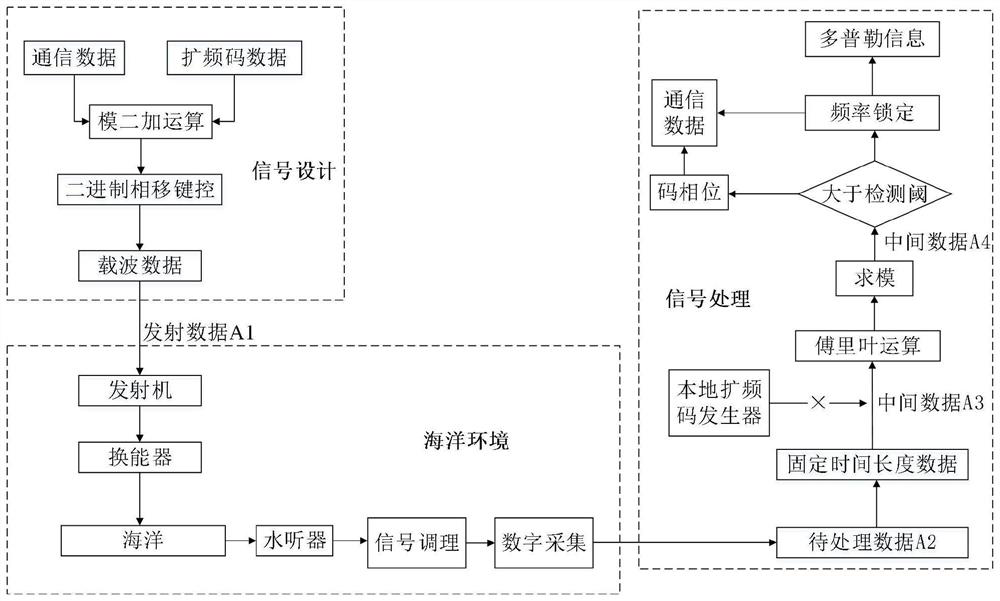
[0027] Please refer to the attached figure 1 , the present invention provides a signal processing method for underwater robot positioning system, including: signal design and signal processing two parts, wherein,
[0028] Signal design includes the following steps:
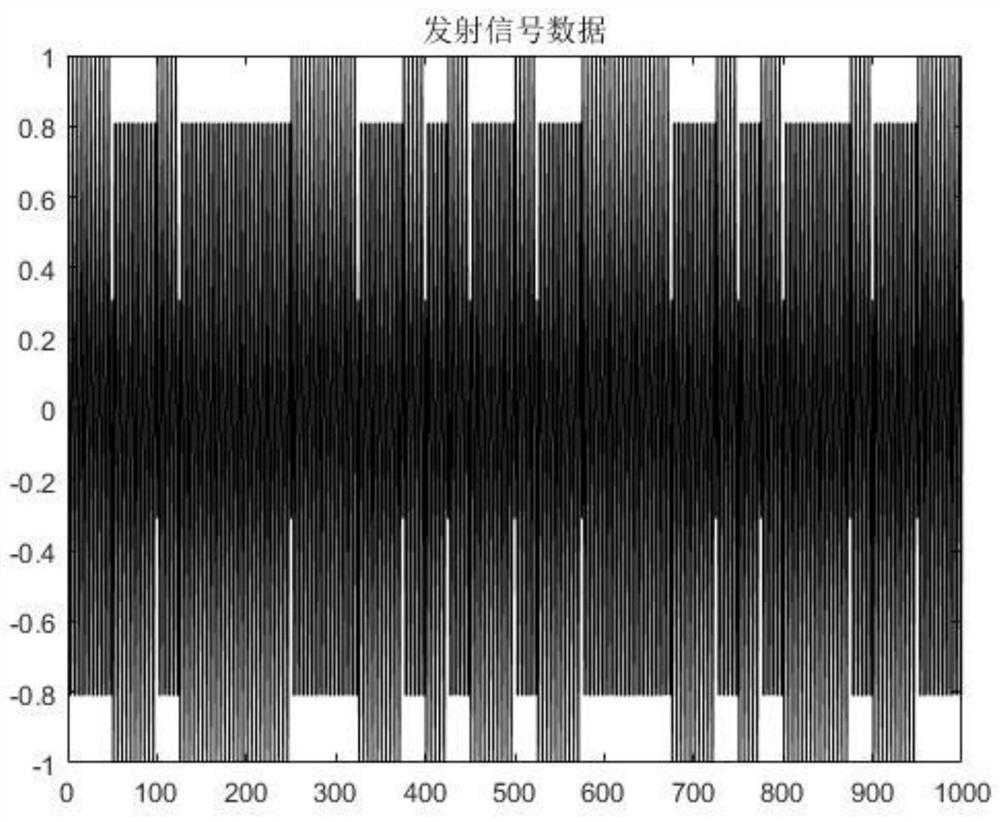
[0029] After the communication data and the spread spectrum code data are modulo-two-added, the result is based on the binary phase-shift keying modulation carrier data, and the result obtained i...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More