

Humanoid patrol operation method and system for semantic intelligent substation robot
A technology for intelligent substations and robots, applied in the field of robots, can solve the problems of data analysis delay, cumbersome process of setting inspection points, and inability to guarantee the quality of inspection points, so as to achieve the effect of precise shooting.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
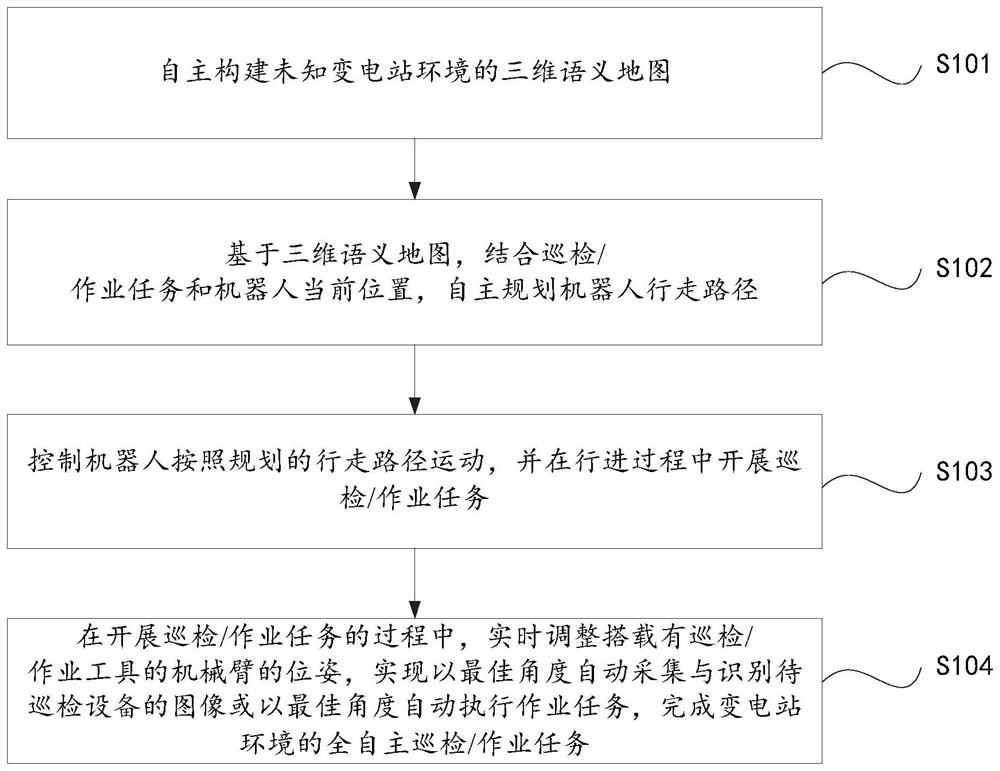
[0068] refer to figure 1 The humanoid inspection operation method of the semantic intelligent substation robot in this embodiment is given, including:
[0069] S101: Independently construct a three-dimensional semantic map of the unknown substation environment;
[0070] S102: Based on the three-dimensional semantic map, combined with inspection / operation tasks and the current position of the robot, autonomously plan the walking path of the robot;
[0071] S103: Control the robot to move according to the planned walking path, and carry out inspection / operation tasks during the traveling process;
[0072] S104: In the process of carrying out inspection / operation tasks, adjust the pose of the robotic arm equipped with inspection / operation tools in real time, so as to automatically collect and identify images of the equipment to be inspected at an optimal angle or automatically collect and identify images of equipment to be inspected at an optimal angle. Execute the operation ta...
Embodiment 2
[0188] This embodiment provides a robot, which uses the human-like inspection operation method of a semantic intelligent substation robot as described in Embodiment 1 to conduct inspections.
[0189] Such as Figure 8 As shown, the robot includes a multi-degree-of-freedom mechanical arm 1 arranged on the robot body, and the end 8 of the multi-degree-of-freedom mechanical arm is equipped with an inspection device 6 .
[0190] Specifically, the inspection equipment mounted on the end of the multi-degree-of-freedom robotic arm includes: visible light camera, infrared camera, hand grip, suction cup, partial discharge detector, etc.
[0191] Referring to Fig. 9(a) and Fig. 9(b), the multi-degree-of-freedom mechanical arm on the robot body is used as the slave arm 4, and the control master arm 5 is set in addition. The master arm is a portable operating system suitable for personnel operation. After wearing the main arm 5, the centralized control operation and maintenance personnel...
Embodiment 3
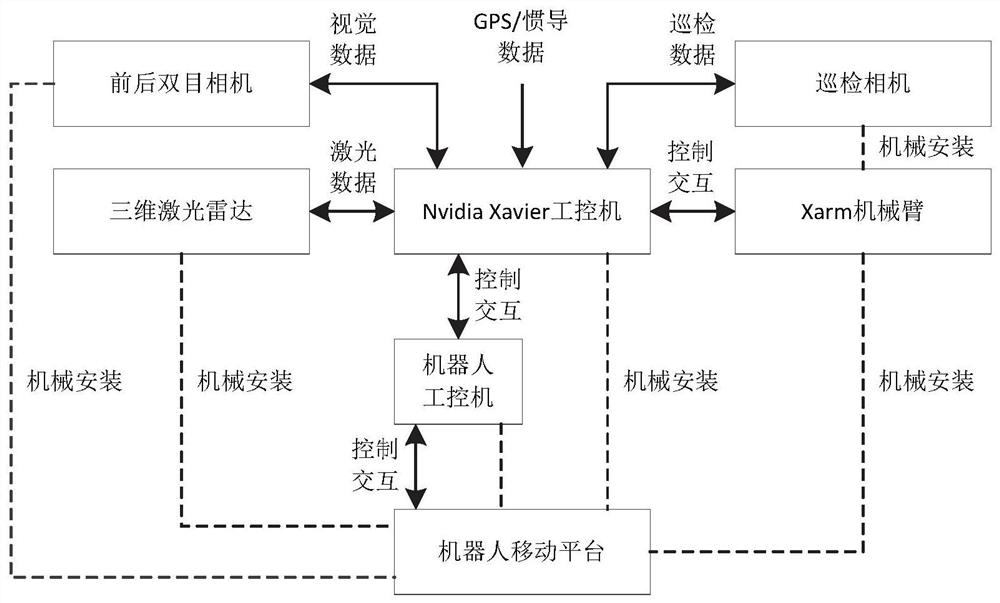
[0203] This embodiment provides a semantic intelligent substation robot humanoid patrol operation system, which includes at least one robot as described in the second embodiment.
[0204] The semantic intelligent substation robot humanoid inspection operation system of this embodiment includes: an embedded AI analysis module, and a multi-degree-of-freedom mechanical arm connected to the embedded AI analysis module, an inspection camera, a binocular vision camera, and a three-dimensional laser radar , inertial navigation sensor, robot industrial computer and mechanical arm; wherein, the binocular vision camera is set at the front end of the robot, the inspection camera is set at the end of the mechanical arm through the mechanical arm, and the robot robot industrial computer is connected to the robot motion platform, which can realize multiple Vision, laser, GPS, inertial navigation and other sensor data are connected and collected synchronously, so as to realize the panoramic p...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More