

Obstacle detection method and device, unmanned aerial vehicle and storage medium
A technology for obstacle detection and unmanned aerial vehicles, which is applied in computer parts, character and pattern recognition, three-dimensional position/channel control, etc. The effect of less resource consumption, avoiding obstacle information drift, and low process complexity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0030] Exemplary embodiments of the present application will be described in more detail below with reference to the accompanying drawings. Although exemplary embodiments of the present application are shown in the drawings, it should be understood that the present application may be embodied in various forms and should not be limited to the embodiments set forth herein. Rather, these embodiments are provided so that the present application can be more thoroughly understood, and the scope of the present application can be fully conveyed to those skilled in the art.
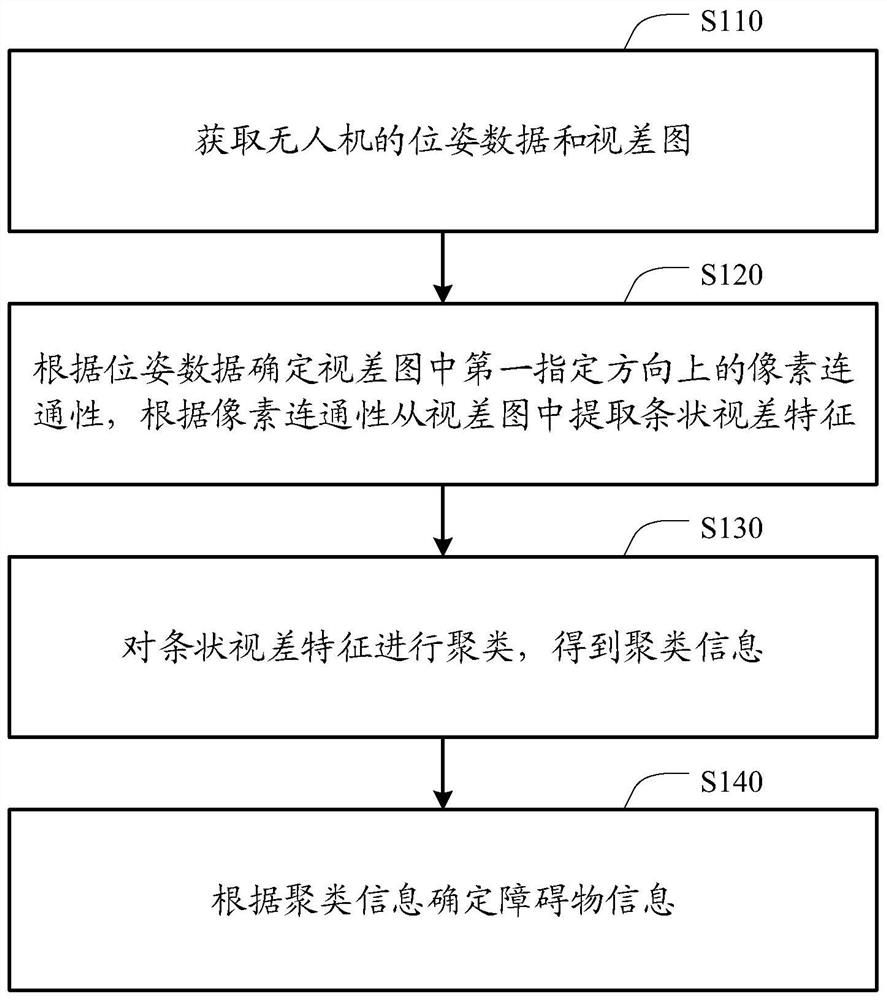
[0031] figure 1 A schematic flowchart of an obstacle detection method according to an embodiment of the present application is shown. Such as figure 1 As shown, the obstacle detection methods include:
[0032] In step S110, the pose data and the disparity map of the drone are acquired, and the pose data and the disparity map have a corresponding relationship.
[0033] Pose data mainly refers to position data a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More