

Combined sliding mode motion control method of flexible mechanical arm
A flexible robotic arm, motion control technology, applied in adaptive control, general control system, control/regulation system, etc., can solve the problems of not considering the influence of system design, not considering the influence of the system, poor anti-interference ability, etc., to achieve vibration Good suppression effect, high trajectory tracking accuracy, and stable closed-loop system
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
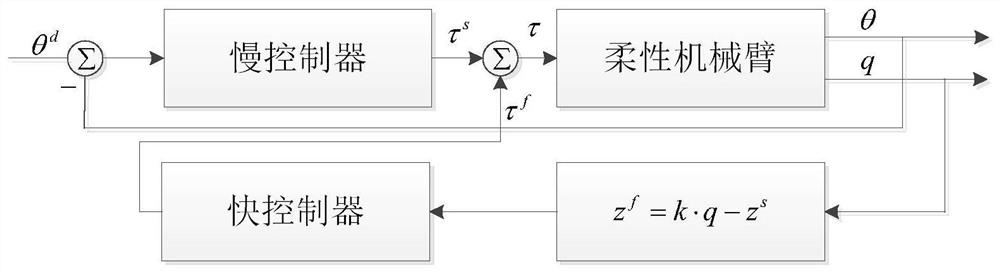
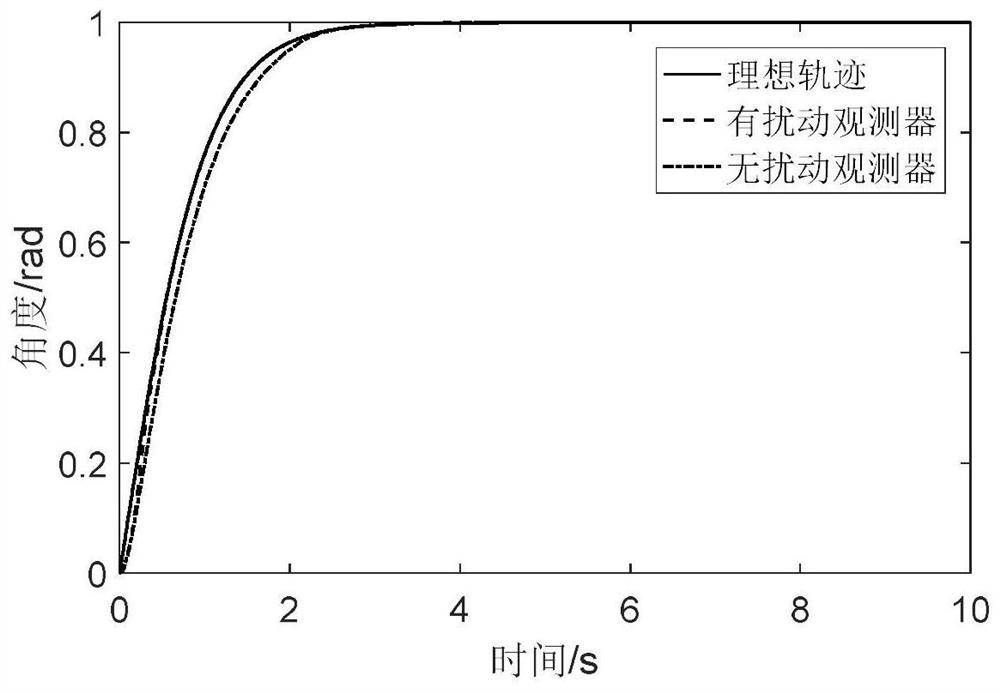
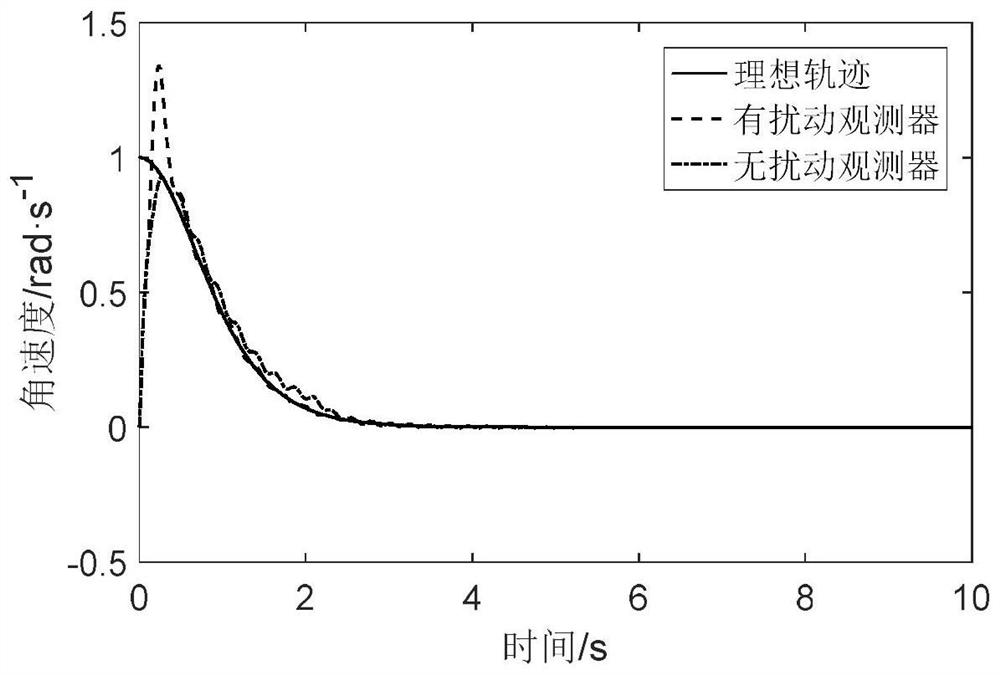
[0026] The invention first obtains the slow and fast subsystems of the flexible mechanical arm based on the singular perturbation theory. In the slow time scale, in order to realize the trajectory tracking of the flexible manipulator, considering the uncertainty of parameters and the influence of external disturbance on the system, an adaptive sliding mode controller based on disturbance observer is designed, which has fast tracking response speed, small error and high tracking accuracy , And can suppress the influence of external disturbances on the system; in the fast time scale, in order to achieve rapid suppression of flexible vibration, consider the impact of system uncertainty such as high-order modes and vibration state under slow time scales, and design a robust sliding mode controller. Experimental results show that the combined sliding mode motion control method of a flexible mechanical arm designed in the present invention has high tracking accuracy, fast vibration su...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More