

Fault detection and isolation method for integrated navigation system of unmanned aerial vehicle
An integrated navigation system and fault detection technology, applied in the field of unmanned aerial vehicles, can solve the problems of increased calculation amount, poor real-time performance, and poor practicability, and achieve the effect of small calculation amount and high reliability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
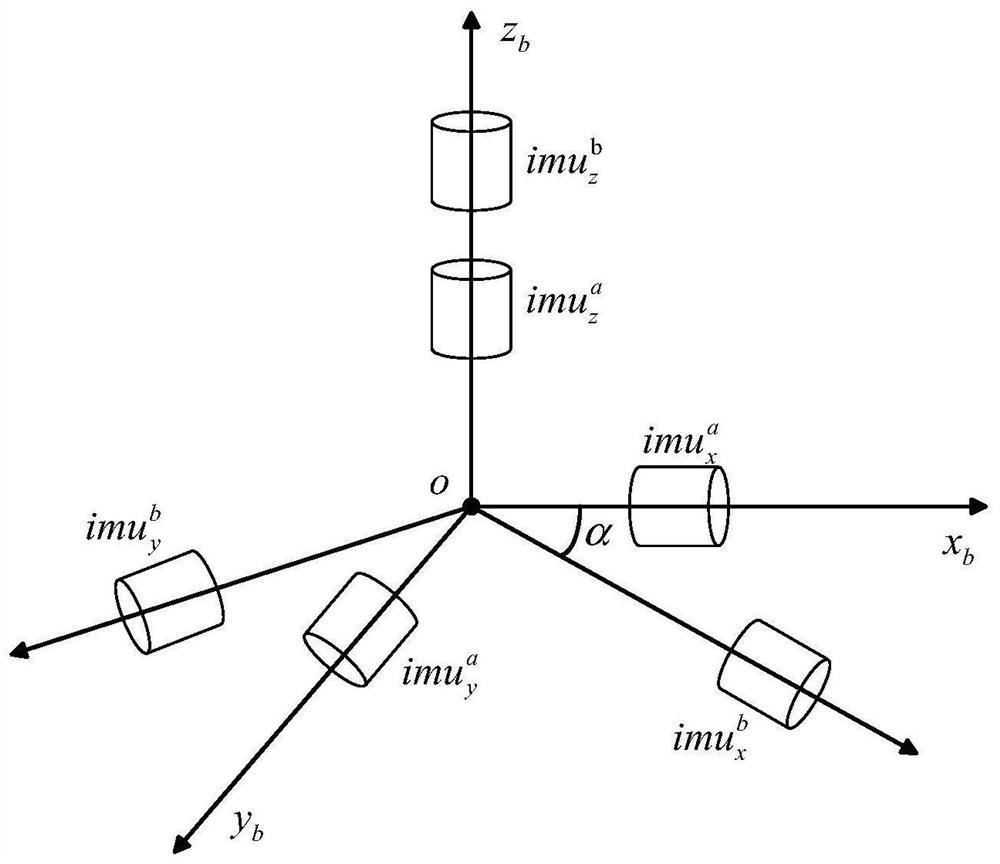
[0037] The redundant strapdown inertial unit can be composed of two or more independent three-axis IMUs that are perpendicular to each other. The following two IMUs are used as an example to illustrate. The installation method is as follows: figure 1 shown, from figure 1 It can be seen that the IMU numbered a is installed coaxially with the UAV body coordinate system, and the IMU numbered b is installed around the Z axis of the UAV system with a positive rotation α angle. Since the Z axes of the two IMUs point to the same direction, it is not correct Fault detection is performed for the gyroscope and accumulator of the Z-axis, and fault detection is performed only for the gyro and accumulator of the X-axis and Y-axis.
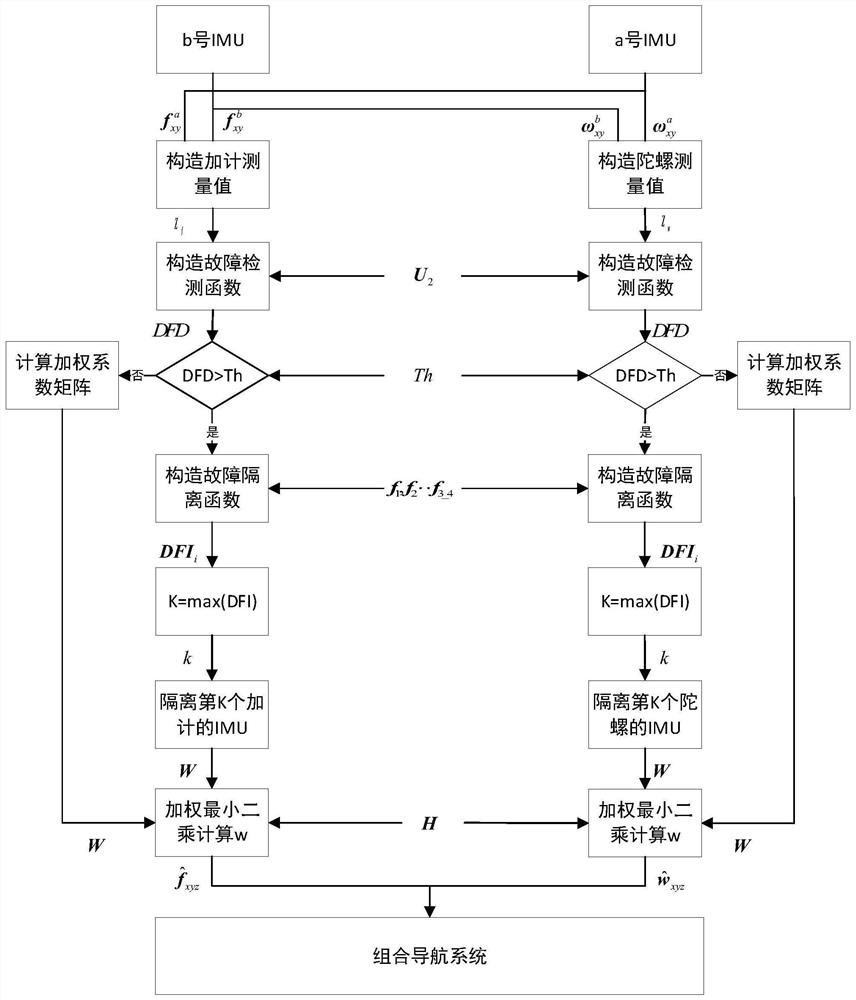
[0038] The flow chart of fault detection and isolation of redundant strapdown inertial groups is as follows: figure 2 shown by figure 2 It can be seen that the fault detection process of the gyro and accumulator is the same. The following uses the gyro as a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More