

Piezoelectric inertia driven two-degree-of-freedom coupling retinal detachment feeding mechanism
A technology of retinal detachment and inertial drive, applied in ophthalmic surgery, etc., can solve problems such as easy to cause other symptoms, low success rate of surgery, easy hand tremor, etc., and achieve the effect of avoiding injury and high precision
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
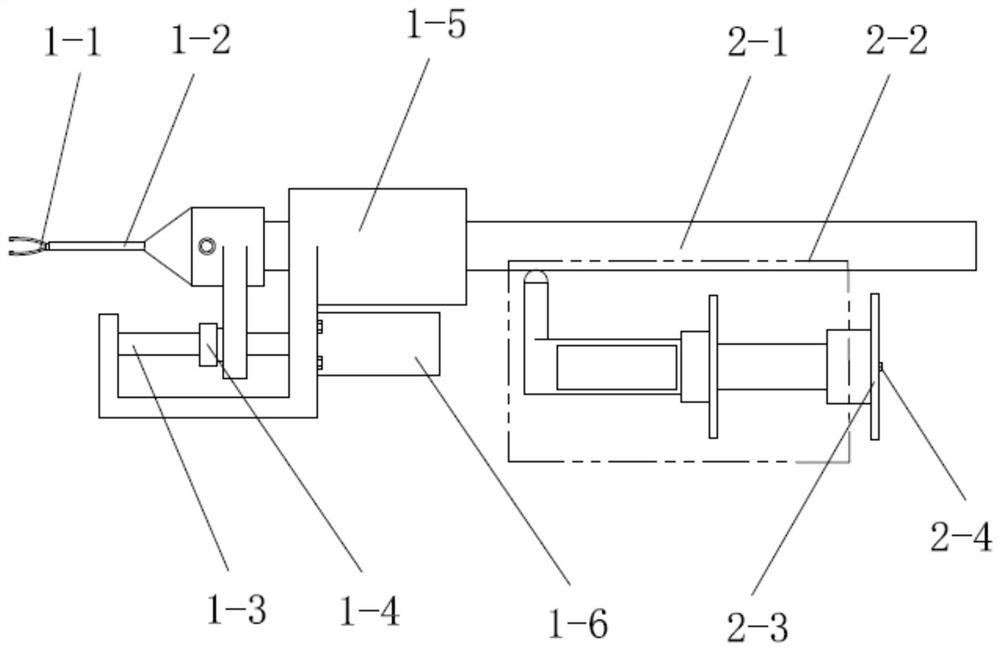
[0018] Specific implementation mode one: combine Figure 1 to Figure 3 To illustrate this embodiment, a piezoelectric inertia-driven two-degree-of-freedom coupled retinal peeling feed mechanism includes a retina clamping module and a driving module, and the driving module includes a motion axis 2-1 and a two-degree-of-freedom coupled piezoelectric inertial motor 2- 2. Piezoelectric stacking base 2-3 and rolling ball plunger 2-4. The retinal clamping module is arranged horizontally. The retinal clamping module includes tweezers 1-1, outer tube assembly 1-2, lead screw 1-3, and nuts 1-4. Connect the fixing part 1-5 and the stepping motor 1-6, the stepping motor 1-6 is installed horizontally on the connecting fixing part 1-5, and the lead screw 1-3 is horizontally installed on the connecting fixing part 1-5 , and the lead screw 1-3 is connected with the output shaft of the stepper motor 1-6, the nut 1-4 is installed on the lead screw 1-3, the outer tube assembly 1-2 is installed ...
specific Embodiment approach 2
[0022] Specific implementation mode two: combination figure 1 Describe this embodiment, the retina clamping module of this embodiment includes tweezers 1-1, outer tube assembly 1-2, lead screw 1-3, nut 1-4, connecting fixture 1-5 and stepper motor 1-6 , the stepper motor 1-6 is horizontally installed on the connecting fixture 1-5, the lead screw 1-3 is horizontally installed on the connecting fixture 1-5, and the output shaft of the lead screw 1-3 and the stepping motor 1-6 Connection, the nut 1-4 is installed on the lead screw 1-3, the outer tube assembly 1-2 is installed on the lead screw 1-3 and moves horizontally on the lead screw 1-3, the tweezers 1-1 is installed horizontally on the outer tube assembly 1 -2 within. With such arrangement, it is convenient to quickly and flexibly adjust the protruding position of the tweezers. Other compositions and connections are the same as in the first embodiment.
[0023] The outer tube assembly 1-2 of this embodiment is composed o...
specific Embodiment approach 3
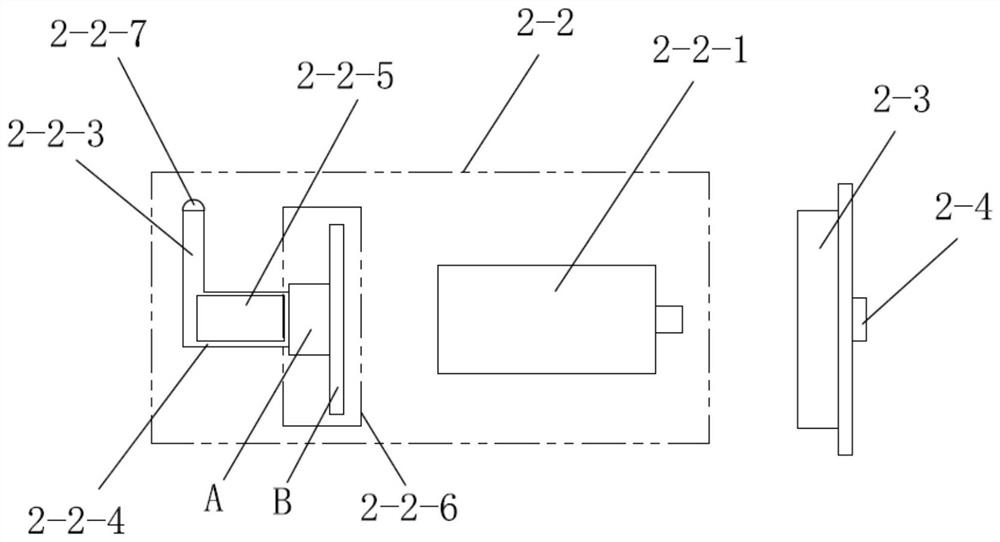
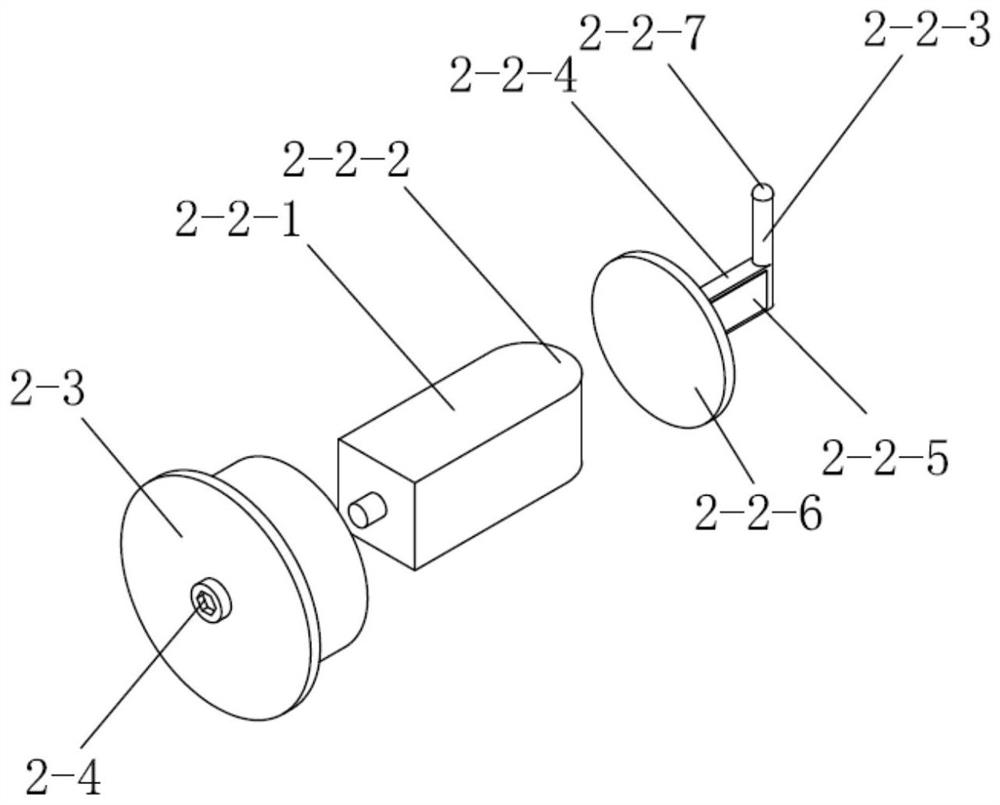
[0024] Specific implementation mode three: combination Figure 1 to Figure 3 Describe this embodiment, the two-degree-of-freedom coupled piezoelectric inertia motor 2-2 of this embodiment includes a piezoelectric stack 2-2-1, a stainless steel ball head 2-2-2 and a flexible beam assembly, and the piezoelectric stack 2-2 One end of -1 is provided with a boss, and the rolling ball head plunger 2-4 is set on the boss, and the other end of the piezoelectric stack 2-2-1 is provided with a stainless steel ball head 2-2-2, a stainless steel ball The front end of the head 2-2-2 is installed with a flexible beam assembly. So set, the rolling ball plunger 2-4 is used to adjust the initial pressure of the piezoelectric stack and the flexible beam base. The stainless steel ball head 2-2-2 is pasted on the piezoelectric stack to prevent the piezoelectric stack from being damaged during expansion and contraction. Other compositions and connections are the same as those in Embodiment 1 or ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More