

Unmanned aerial vehicle cluster path planning method and system based on artificial potential field method
An artificial potential field method and path planning technology, applied in control/regulation systems, vehicle position/route/altitude control, instruments, etc., can solve the problems of slow speed and long planning time, achieve short time consumption and enhance mobility , the effect of improving efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
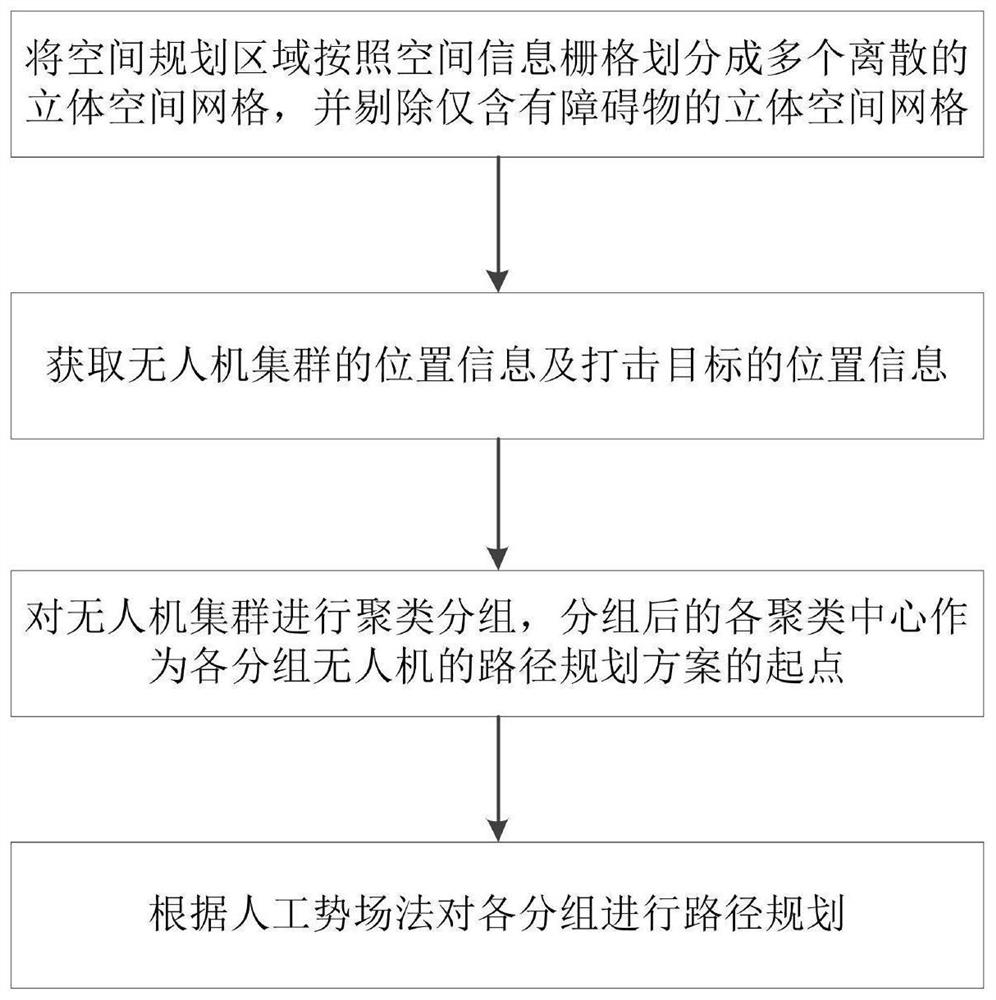
[0043] Figure 1 to Figure 3 Shown is a specific embodiment of the present invention based on the artificial potential field method of the UAV cluster path planning method, including the following steps:
[0044]Step 1: Divide the spatial planning area into multiple discrete three-dimensional spatial grids according to the spatial information grid, and remove the three-dimensional spatial grids containing only obstacles; the specific method of dividing into spatial grids is: The planning area is divided into multiple rectangular grids in the horizontal direction; then the UAV space planning area is statistically divided into multiple layers along the vertical height direction according to the parameters of the UAV. The three-dimensional grid division for space in this embodiment is not a simple average distribution, but statistically divided according to the parameters of various existing drones on the vertical height, and the height is divided according to 0, 6, 450, 1000, 30...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More