

Monitoring method and system for large unmanned transport vehicle
A technology for monitoring systems and transport vehicles, which is applied in closed-circuit television systems, TV system components, image data processing, etc., and can solve the problems of inability to meet the monitoring needs of large unmanned transport vehicles, failure to detect abnormal conditions in time, and surrounding environment monitoring, etc. problems, to improve computing performance and reliability, reduce volume and maintenance costs, and save costs
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0045] The embodiments of the present invention are described in detail below. This embodiment is implemented on the premise of the technical solution of the present invention, and detailed implementation methods and specific operating procedures are provided, but the protection scope of the present invention is not limited to the following implementation example.
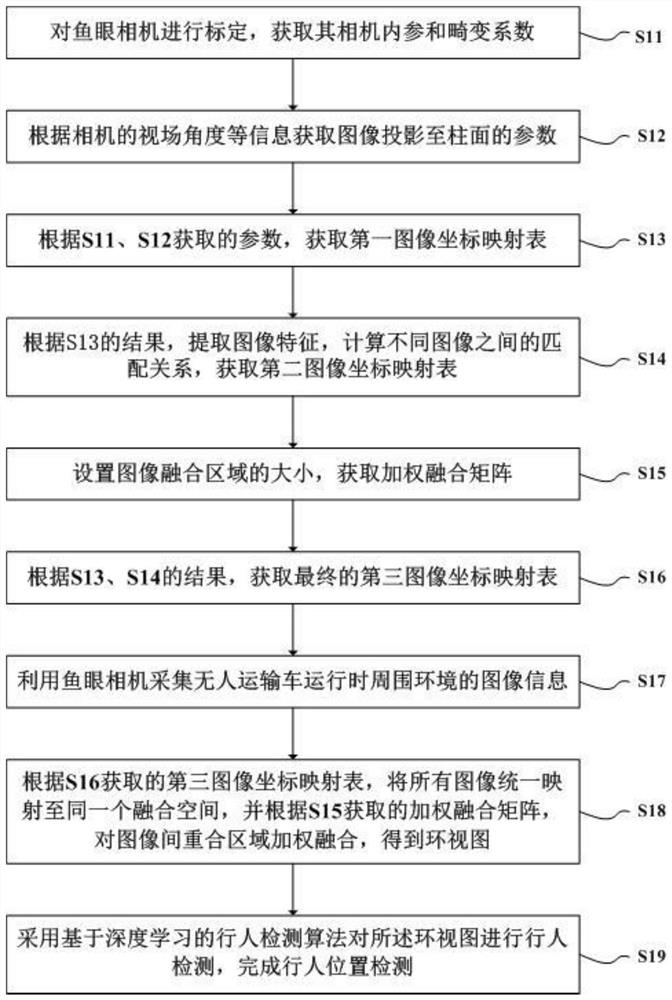
[0046] Such as figure 1 Shown is a flowchart of a monitoring method for a large unmanned transport vehicle according to an embodiment of the present invention.
[0047] Please refer to figure 1 , the monitoring method of the present embodiment comprises the following steps:
[0048] S11: Calibrate the fisheye camera, and obtain its camera internal parameters and distortion coefficients;
[0049] In this step, a checkerboard calibration board with a length of 3 meters and a width of 2 meters is used for calibration. A larger calibration board can adapt to outdoor scenes and achieve better distortion correction ef...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More