

Robot milling flutter prediction and main modal analysis method
A technology of milling chatter and analysis method, which is applied in the direction of design optimization/simulation, special data processing application, etc. It can solve the problems of not being able to obtain Lobe diagrams, occupying huge computing resources, and fewer multi-modal robots, so as to improve stability prediction Efficiency, simple calculation, and the effect of improving processing efficiency and processing quality
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0043] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments. It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention. In addition, the technical features involved in the various embodiments of the present invention described below can be combined with each other as long as they do not constitute a conflict with each other.
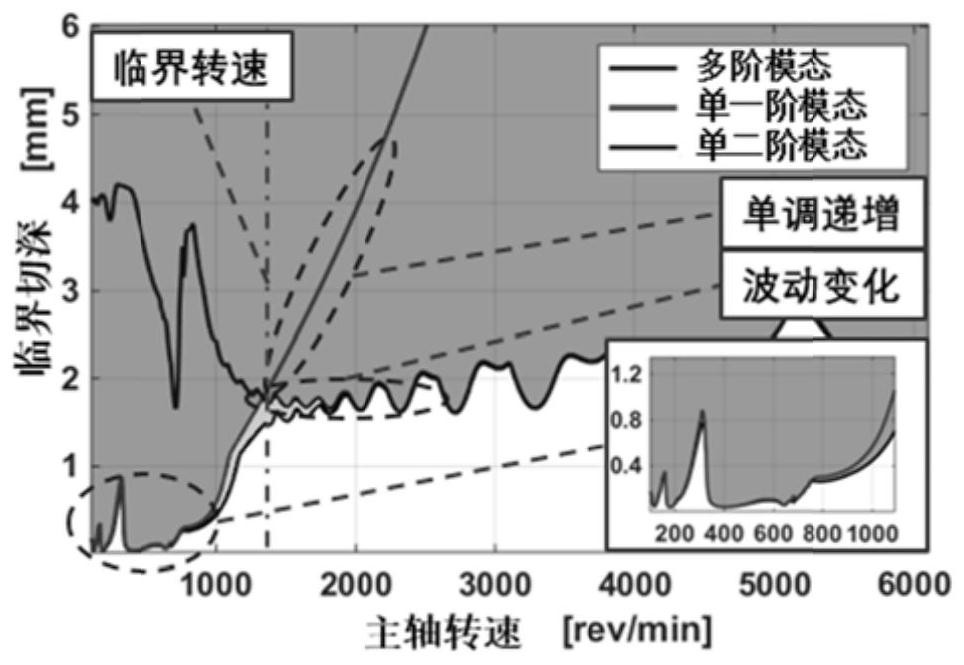
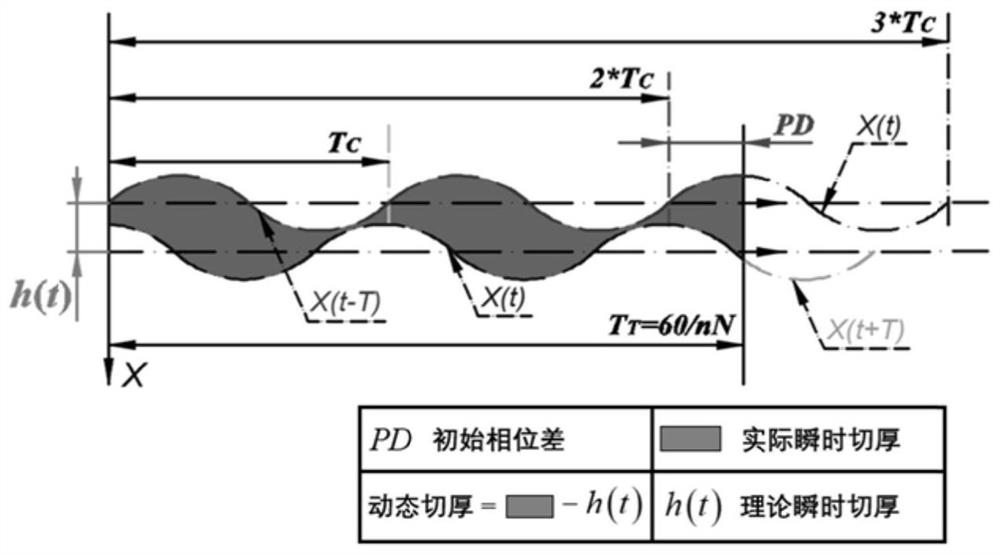
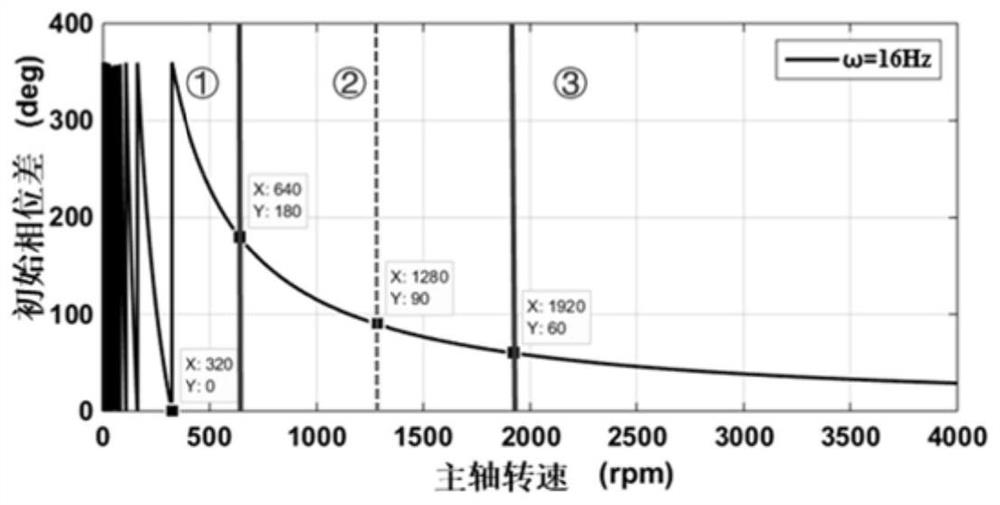
[0044] see Figure 8 , Figure 9 , Figure 10 and Figure 11 , the robot milling chatter prediction and main mode analysis method provided by the present invention, the analysis method studies the variation law of the dynamic cutting thickness with the rotating speed under different modes, and based on this, it is first proposed to judge the main influence under a certain working condition m...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More