

Double-filter fusion positioning system for park automatic driving
A self-driving, dual-filter technology, applied in control/adjustment systems, two-dimensional position/lane control, instruments, etc., can solve the problem that the laser SLAM module does not adopt a better optimization method and does not consider the vehicle plane motion constraints And other issues
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0070] The present invention will be described in detail below in conjunction with the accompanying drawings.
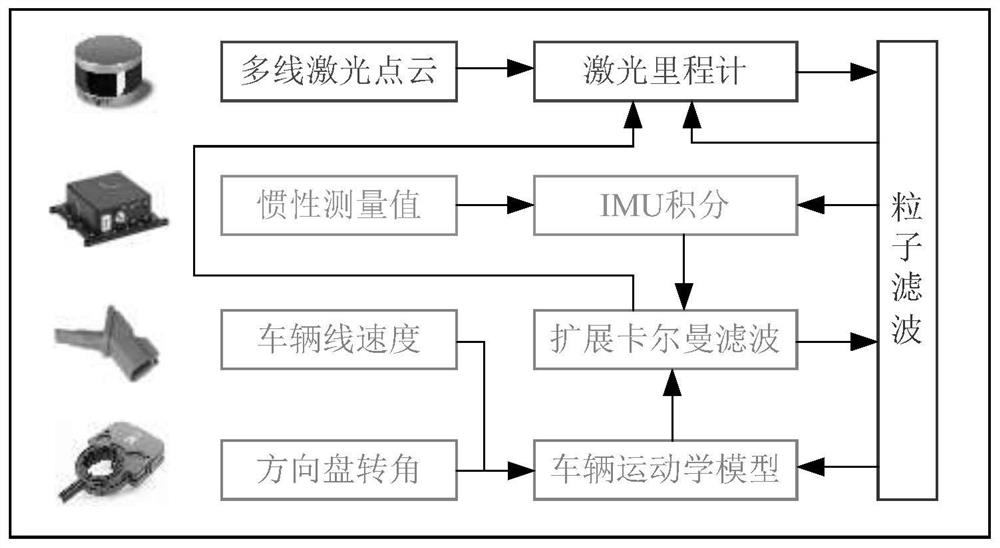
[0071] Such as figure 1 As shown, the architecture diagram of the dual-filter fusion positioning algorithm for autonomous driving in the park consists of five modules: vehicle kinematics model module, IMU integration module, extended Kalman filter module, laser odometer module and particle filter module.
[0072] The input to this localization system consists of four sensors: lidar, IMU, wheel speed sensor and steering wheel angle sensor. The extended Kalman filter technology is used to fuse the vehicle kinematics model and the IMU integral, the vehicle kinematics model provides the predicted value, and the IMU integral provides the measured value, so as to obtain the predicted pose of the vehicle. The optimal pose of the vehicle is obtained through the laser odometer and used as the measurement value of the particle filter, and the predicted pose of the vehicle pro...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More