

Underwater carrier integrated navigation method based on MEMS IMU/magnetometer/DVL integration
A technology of integrated navigation and integrated navigation system, which is applied in the field of integrated navigation of underwater vehicles, and can solve the problems of large size, high price, and difficulty in precise navigation of underwater vehicles.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0071] Embodiments of the present invention are described in detail below, and the embodiments are exemplary and intended to explain the present invention, but should not be construed as limiting the present invention.
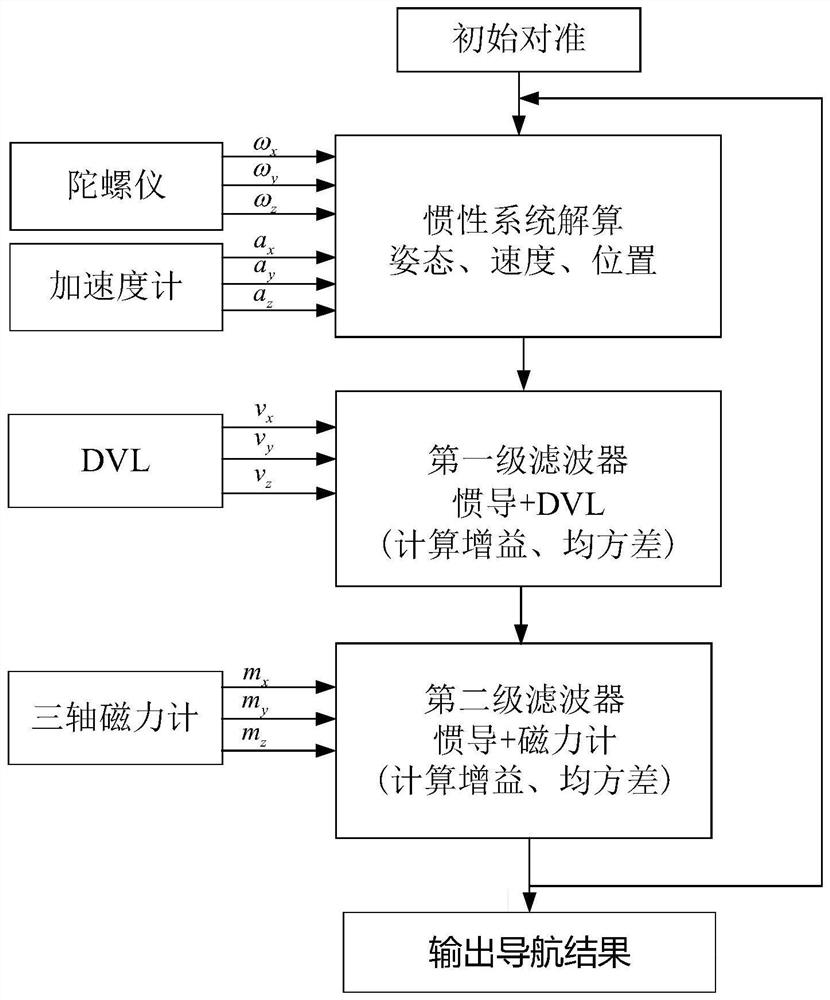
[0072] The present invention proposes an underwater carrier integrated navigation method based on MEMS IMU / magnetometer / DVL combination, which includes initial alignment process, inertial solution process, speed measurement Kalman filter process and heading vector measurement Kalman filter process. After the underwater vehicle enters the water, the initial heading attitude of the underwater vehicle is obtained by using the magnetometer and accelerometer, and the initial alignment process is completed. The satellite navigation data is introduced here as the initial position of the inertial navigation recursion calculation.
[0073] When the underwater vehicle is navigating underwater, the MEMS IMU / magnetometer / DVL integrated navigation method is adopted, the h...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More