

Mechanical arm real-time tracking method based on binocular vision guidance
A technology of real-time tracking and binocular vision, applied in the field of robot vision, can solve the problems of failure to provide robotic arm vision guidance solutions, poor tracking effect, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0061] specific implementation plan
[0062] The specific implementation manner of the present invention will be described in detail below in conjunction with the accompanying drawings and technical solutions.
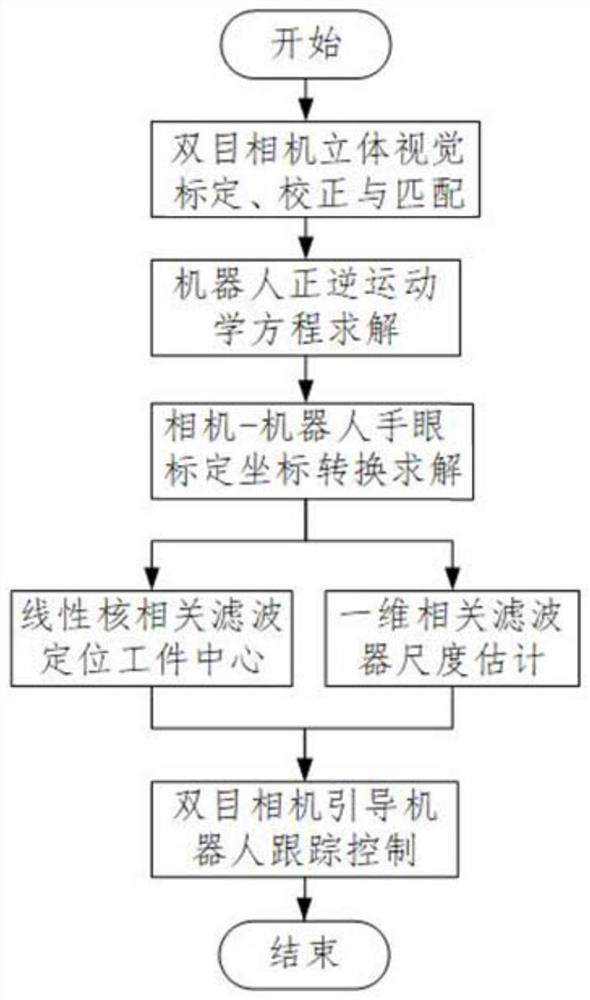
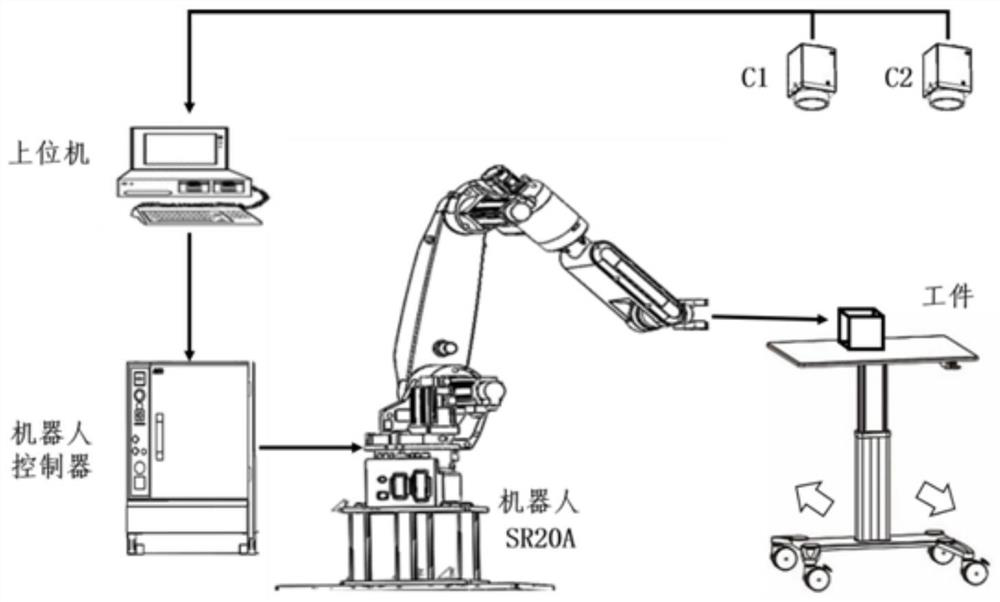
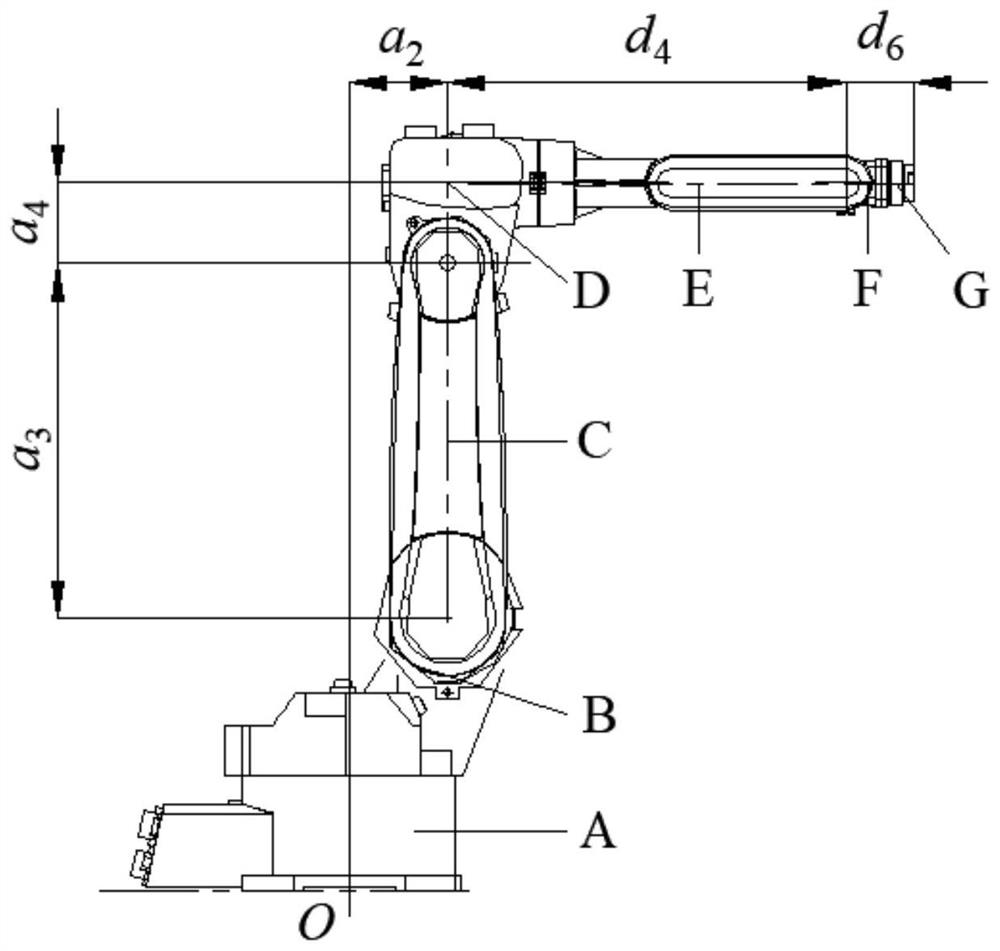
[0063] The binocular vision-guided real-time tracking method of the manipulator first performs the calibration, correction and matching of the binocular camera, and the forward and inverse kinematics modeling of the manipulator. Then establish the coordinate transformation relationship between the manipulator and the binocular camera. Finally, the binocular camera is used to quickly collect the image sequence, and the image sequence collected by the left camera C1 is processed by using the linear kernel correlation filter and one-dimensional correlation filter fusion algorithm to obtain the two-dimensional coordinates of the workpiece center and the workpiece scale of each frame of image. At the same time, the images collected by the left and right cameras C1 and C2 a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More