

An open-frame fully automatic underwater robot for cleaning attachments on the bottom of a ship
A technology for underwater robots and attachments, which is applied to ship cleaning devices, hulls, and ship construction. It can solve the problems of high cost, environmental pollution, and low efficiency of ship bottom cleaning technology, and achieve low construction costs, high cleaning efficiency, and clean good effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0036] The present invention will be further described in detail below in conjunction with the accompanying drawings and specific embodiments.
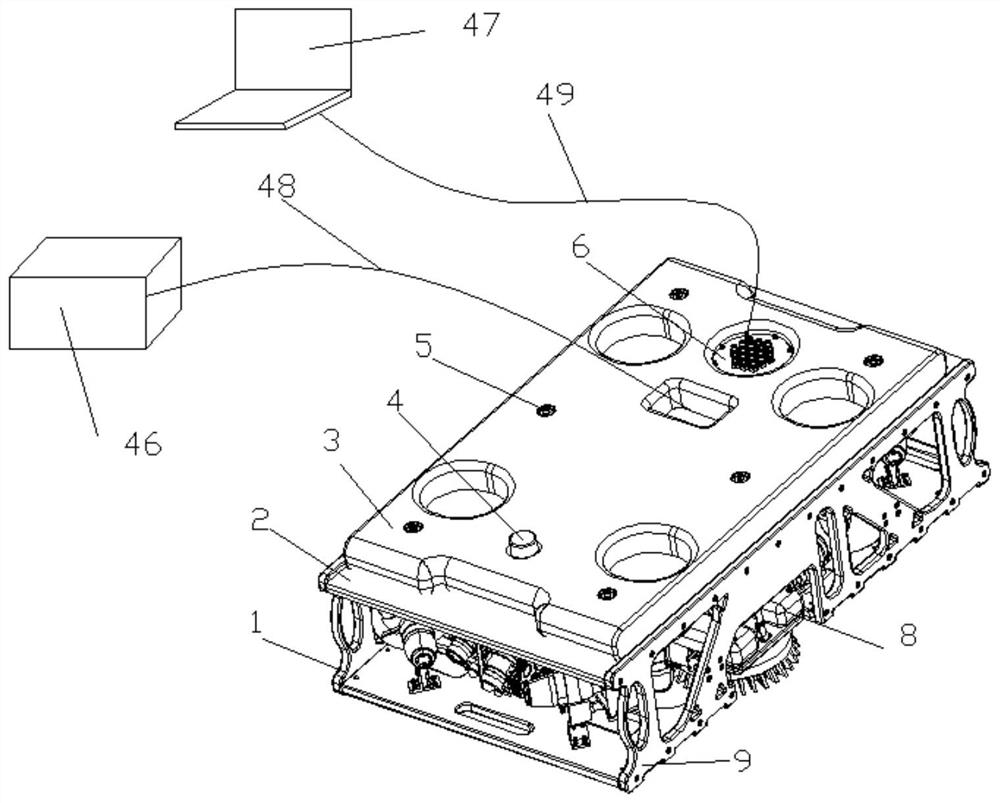
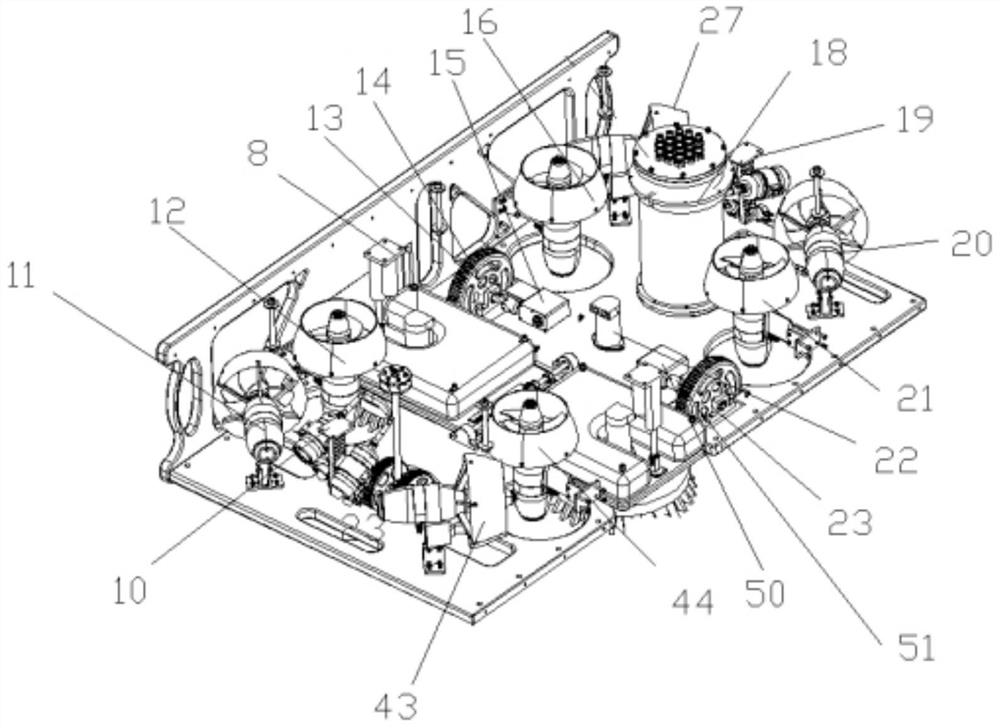
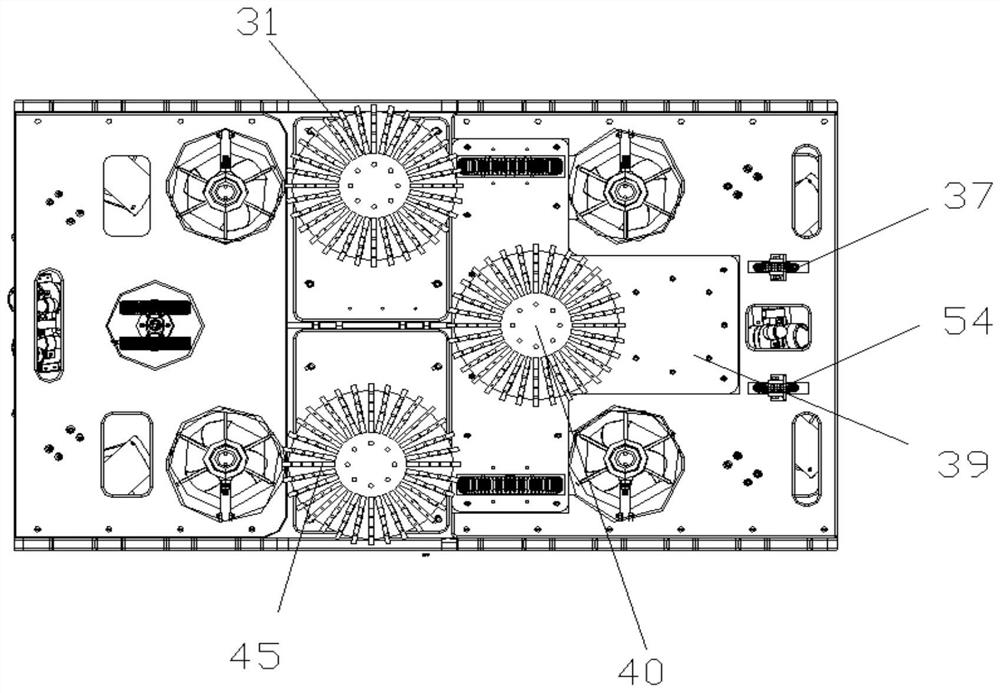
[0037]An open-frame fully automatic underwater robot for cleaning attachments on the bottom of a ship. The device is composed of an above-water device and an underwater device, which are connected by a zero-buoyancy cable 49 and a hydraulic pipe 48; the above-water device includes a hydraulic device 46 and a controller 47 , the underwater device consists of four parts: skeleton, power device, cleaning device, control cabin, and auxiliary device; through the thrust distribution control of multiple propellers, the control of any working posture of the device can be realized, so that the cleaning part at the bottom of the device is close to the bottom wall of the ship, Through the hydraulic control, the high-speed rotation of the cleaning round brush on the bottom of the robot can remove the attachments on the bottom of the ship bottom, a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More