

A Soft Artificial Muscle Actuator for Deep Sea Applications
A technology of artificial muscles and drivers, applied in the direction of manufacturing tools, program control manipulators, manipulators, etc., can solve the problems of heavy weight, high economic cost, poor flexibility, etc., and achieve excellent stability and corrosion resistance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0025] The following will clearly and completely describe the technical solutions in the embodiments of the present invention with reference to the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only some, not all, embodiments of the present invention. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without making creative efforts belong to the protection scope of the present invention.
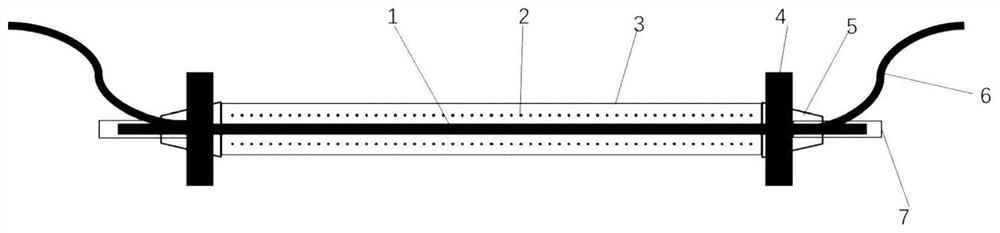
[0026] Such as figure 1 As shown, the present invention provides a soft artificial muscle driver applied to the deep sea, including shape memory alloy wire (SMA) 1, fluid filler 2, flexible tube 3, ceramic sheet 4, sealant 5, wire 6 and metal tube 7 , the shape memory alloy wire 1 is set in the flexible tube 3, the fluid filler 2 is set in the flexible tube 3, the flexible tube 3 is set between two ceramic sheets 4 with holes, the metal tube 7 is fixed at bot...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More