

Multi-agent formation collaboration device and control method thereof
A multi-agent, intelligent body technology, applied in two-dimensional position/channel control, vehicle position/route/altitude control, non-electric variable control, etc. Large and other problems, to achieve the effect of improving strength, high stability, and improving anti-collision effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0048] The multi-agent formation may be an unmanned vehicle formation, an unmanned ship formation, and an unmanned aerial vehicle formation, etc. This embodiment takes the unmanned aerial vehicle formation as an example.
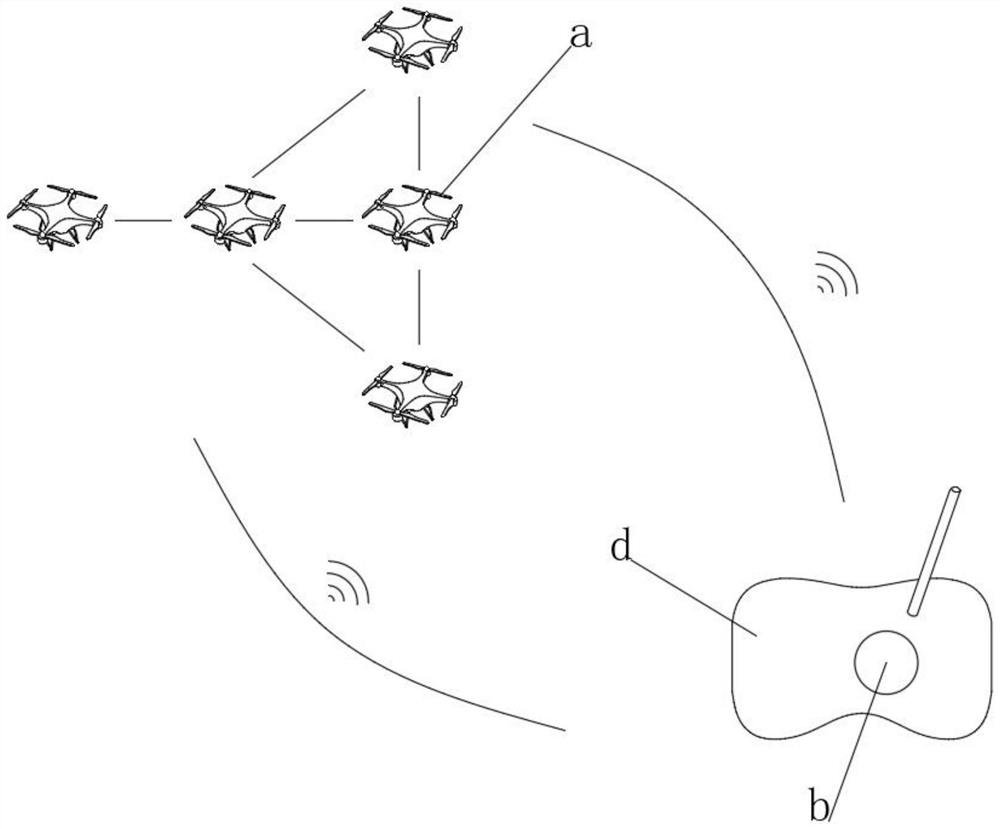
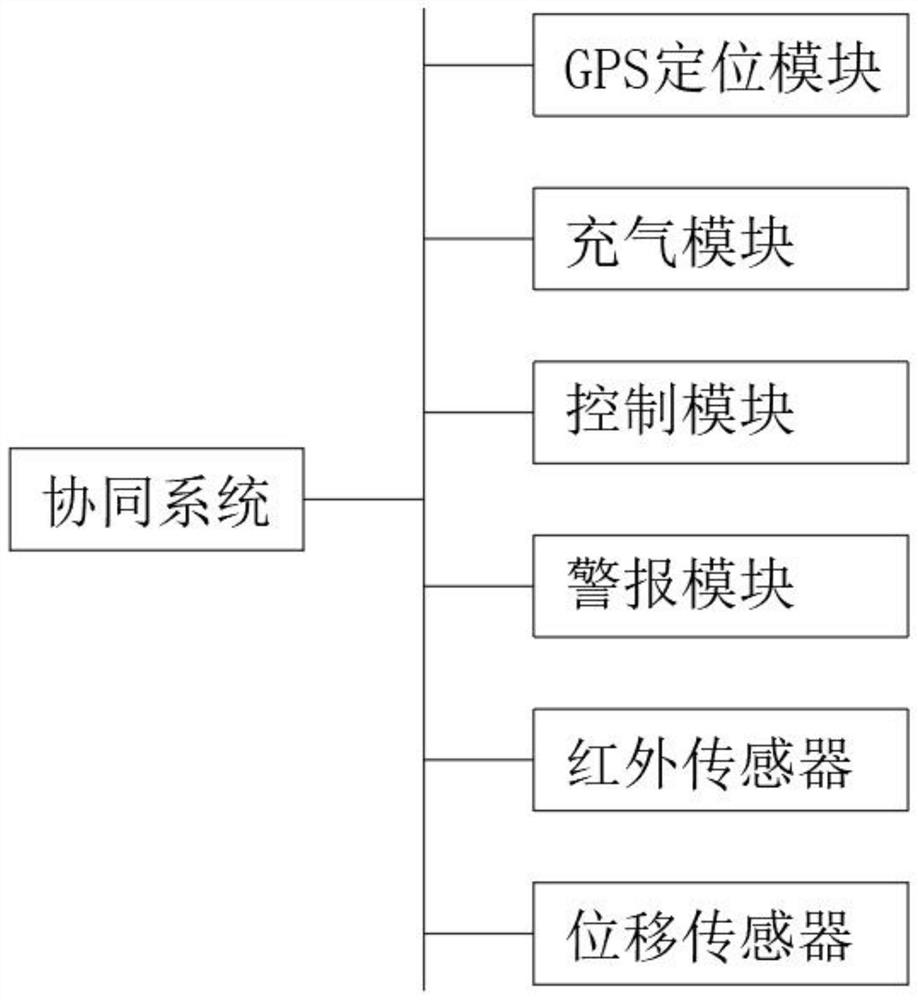
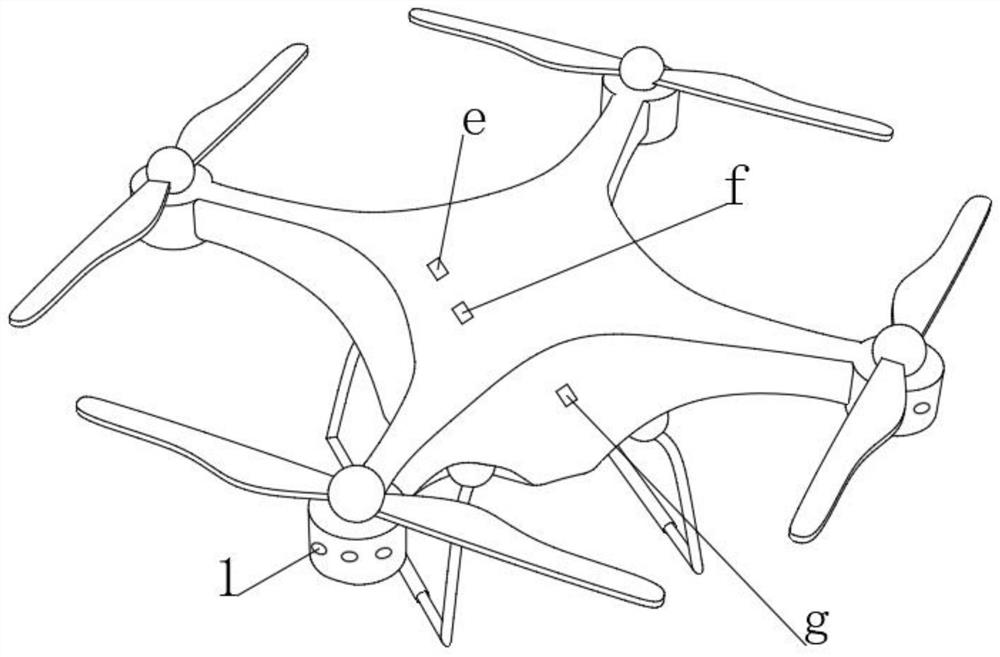
[0049] see Figure 1-3 In the figure, a represents the UAV formation, b represents the alarm module, d represents the cooperative remote control, e represents the GPS positioning module, f represents the displacement sensor, g represents the infrared sensor, a multi-UAV formation coordination device, including the cooperative remote control device and coordination system, the coordination system includes GPS positioning module, infrared sensor, displacement sensor, inflatable module installed on the UAV, alarm module and control module installed on the cooperative remote control, GPS positioning module, infrared sensor, displacement sensor Connect with control module signal.
[0050] see Figure 4-5 , the inflatable module includes a group of folding airba...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More