

A 3D point cloud map fusion method and system for a substation inspection robot
An inspection robot and map fusion technology, applied in the field of intelligent robots, can solve problems such as fusion failure, achieve high-precision fusion, avoid failure risks, and meet the effect of positioning
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0119] In order to make the purposes, technical solutions and advantages of the embodiments of the present invention clearer, the technical solutions in the embodiments of the present invention will be clearly and completely described below with reference to the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments These are some embodiments of the present invention, but not all embodiments.
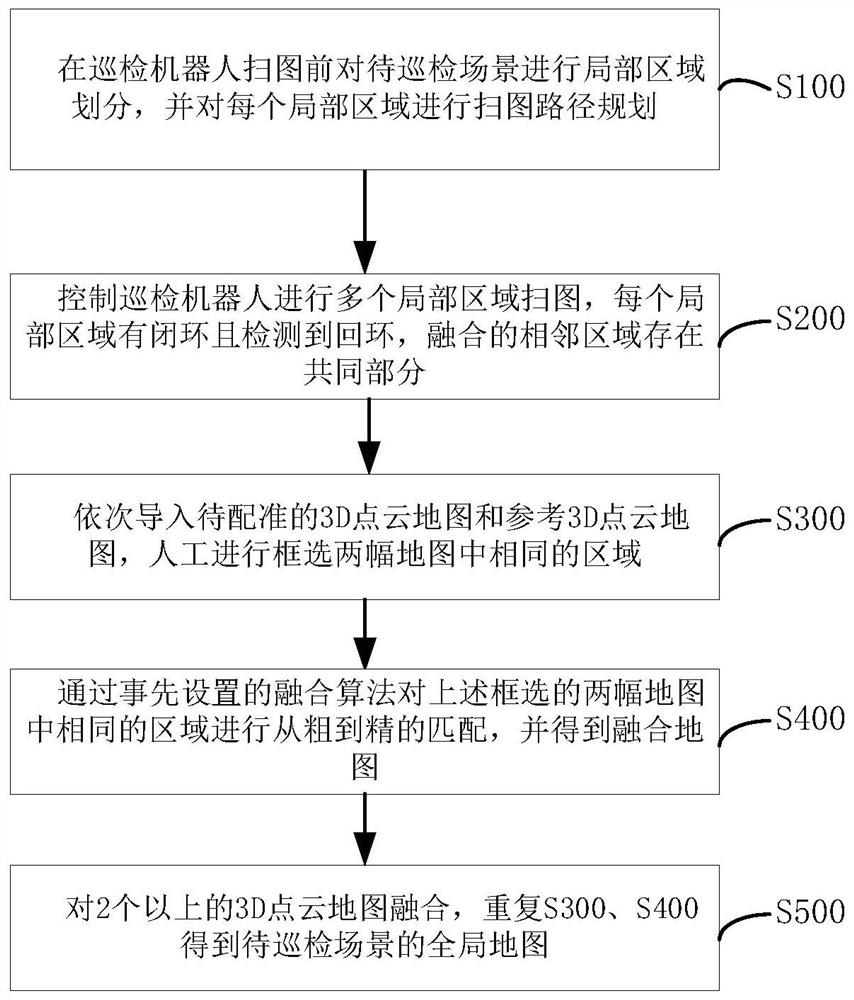
[0120] like figure 1 As shown, the 3D point cloud map fusion method of the substation inspection robot described in this embodiment includes:
[0121] S100, before the inspection robot scans the image, divide the local area of the scene to be inspected, and plan the scanning path for each local area;
[0122] S200, controlling the inspection robot to scan a plurality of local areas, each local area has a closed loop and a loopback is detected, and the adjacent areas fused have a common part;
[0123] S300, import the 3D point cloud ma...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More