A multi-steering mode control method based on obstacle avoidance system
A mode control, multi-steering technology, applied in the field of vehicle steering, can solve the problems of small field of view, waste of space resources, inflexible steering, etc., to achieve the effect of improving flexibility, saving steering space, and simplifying side storage operations.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
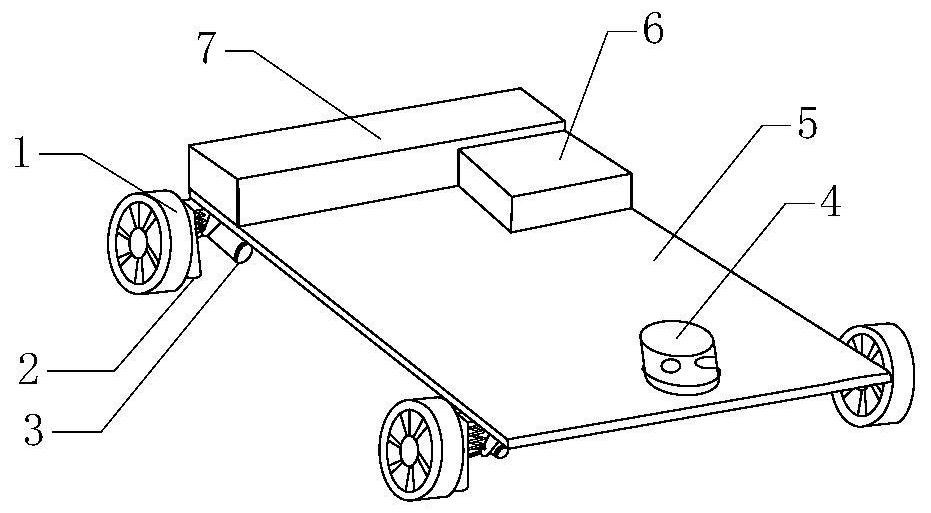
[0070] The wheelbase L of the vehicle used is 1200mm, the wheelbase W is 1000mm, the effective distance set on the touch screen is 3000mm, and the speed is 1m / s. The movement of a servo motor drives the bogie to rotate through an angle of The four hub motors rotate at v 1 =-v 2 =-v 3 =v 4 = 1, the vehicle starts to spin at last, and when there is no obstacle in front of the vehicle, it can drive out of the obstacle zone by linear motion.
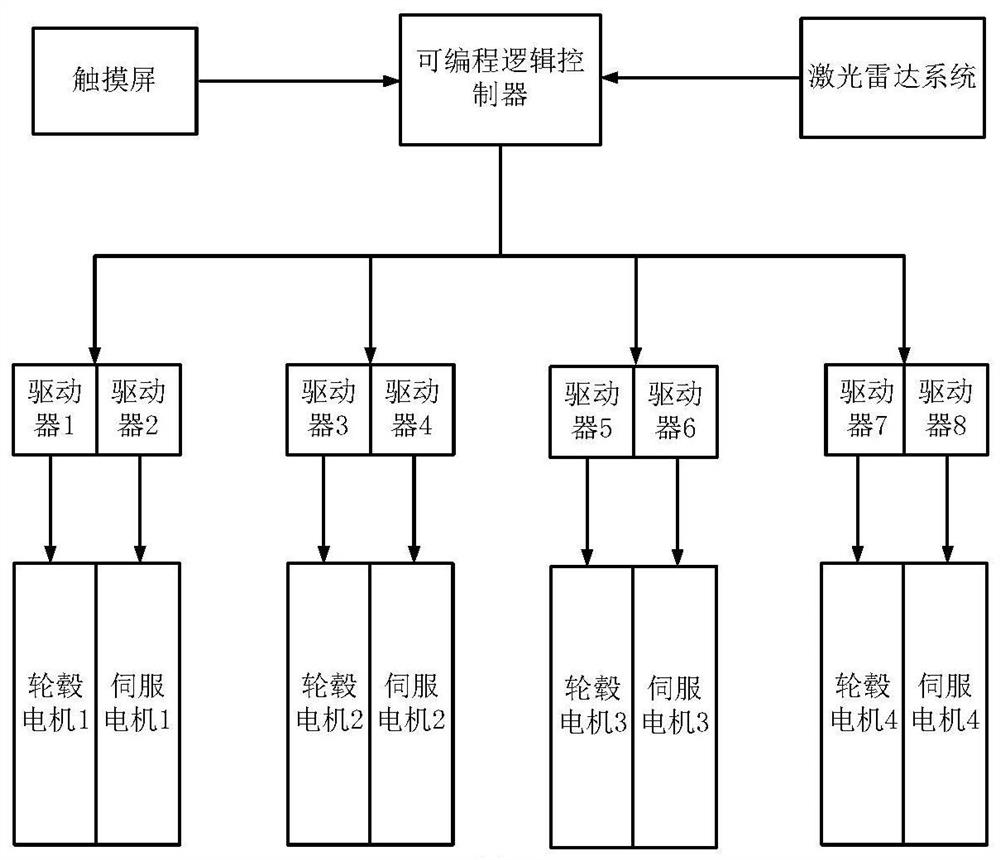
[0071] Such as figure 2 The control structure diagram is shown, the touch screen sends commands to the PLC, the PLC controls eight motors, and the encoder and laser radar system feed back real-time signals to the PLC.
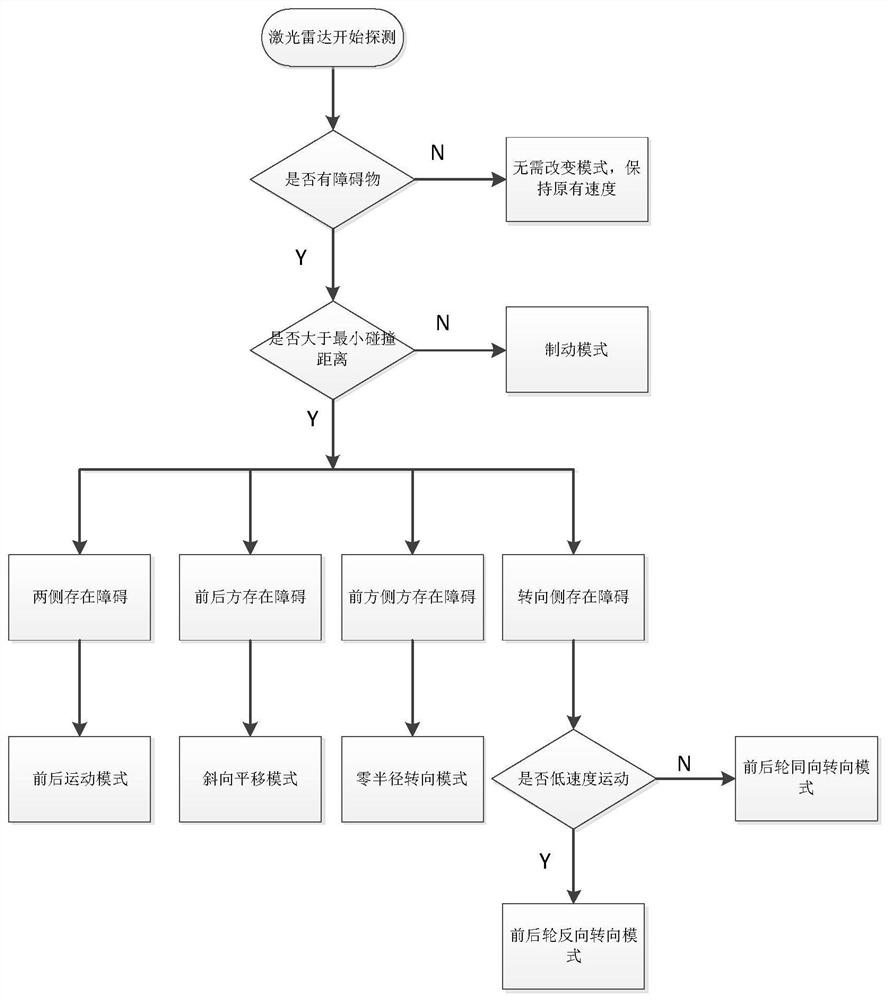
[0072] Such as Figure 4 As shown, when the lidar system detects obstacles on both sides of the vehicle, that is, the shadow area. When the four wheels of the vehicle rotate forward or reverse at the same speed, forward or backward movement can be realized.
[0073] Such as Figure 5 As shown, when the lidar system...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More