

Steel wire rope performance testing device for flexible rope driven rehabilitation robot and testing method thereof
A rehabilitation robot and cable-driven technology, applied in the direction of measuring devices, applying stable tension/pressure to test the strength of materials, instruments, etc., can solve the problems of single wire rope winding mode, inconvenience, lack of wire rope detection devices, etc., and achieve flexible load Controllable, improve test efficiency, and compact structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
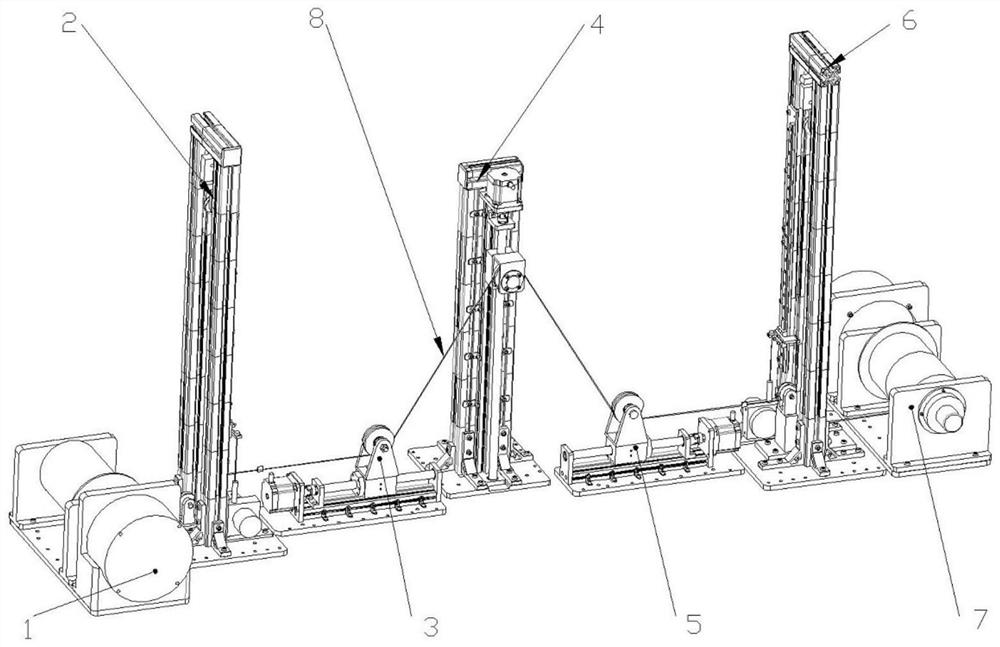
[0055] combine figure 1 , a wire rope performance test device for a cable-driven rehabilitation robot consists of a left torque motor module 1, a left measurement module 2, a left horizontal pulley module 3, a vertical pulley module 4, a right horizontal pulley module 5, a right measurement module 6, and a right torque motor The module 7, the steel wire rope 8 to be tested and the electromechanical control system are partially composed. Each module of the test bench can be installed on a marble plane or an aluminum alloy profile base through the mounting holes reserved at the bottom of the module.
[0056] Furthermore, the structure of the left torque motor module 1 is exactly the same as that of the right torque motor module 7, and the two are mirrored with respect to the vertical pulley module 4; Mirror image distribution; the left horizontal pulley module 3 and the right horizontal pulley module 5 have the same structure, and the two are mirror images with respect to the v...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More