

Rapid feeding and grabbing device and feeding method thereof
A material grasping and fast technology, which is applied in the field of fast loading and grabbing devices, can solve the problems of reducing fast loading and production beats, and achieve the effects of avoiding repeated positioning, improving efficiency, and saving positioning time
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0031] Specific embodiments of the present invention will be described in detail below in conjunction with the accompanying drawings.
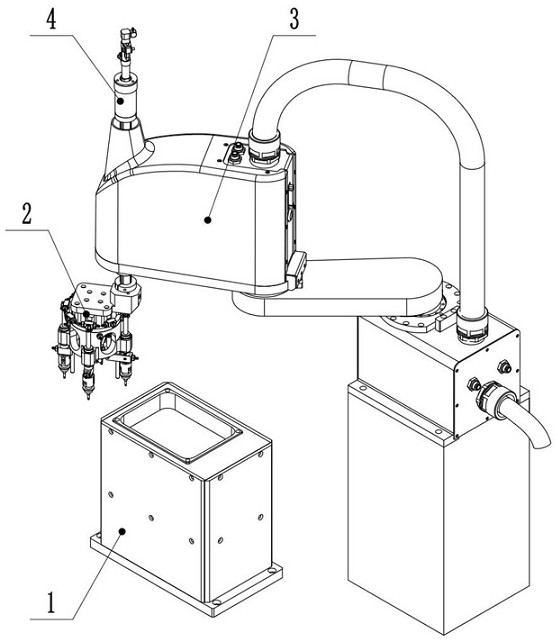
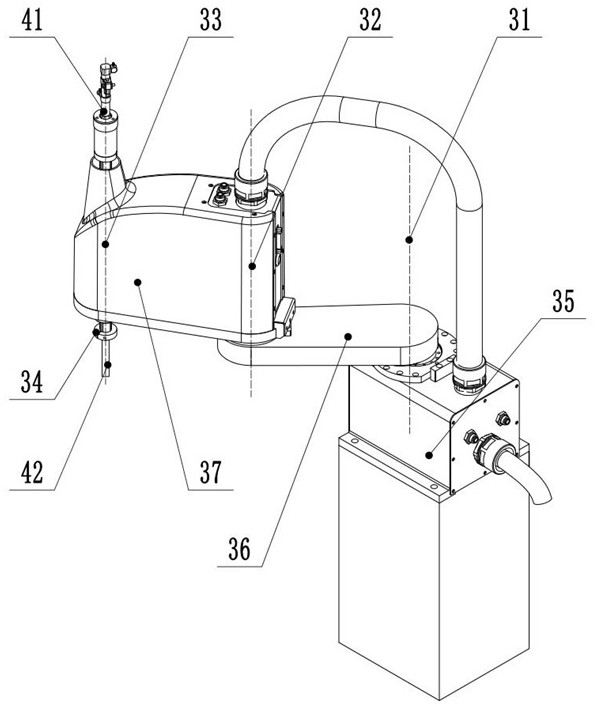
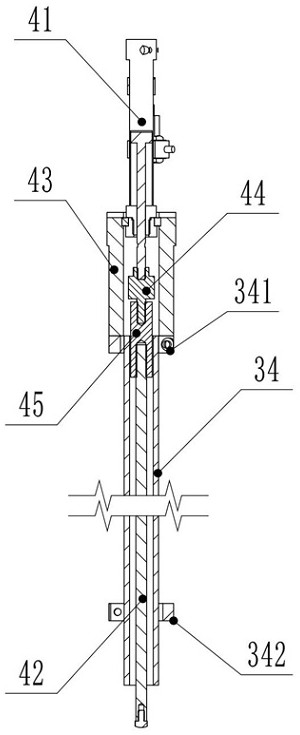
[0032] Such as Figure 1-5 A fast loading and grabbing device is shown, which is used for quickly grabbing regularly stacked materials on the material table, improving the efficiency of equipment grabbing materials, and thus improving production efficiency. The device moves the manipulator 2 directly above the material table 1 through the rotation of the robot arm 3. After obtaining the position information of the material on the material table, the robot arm 3 further aligns the axis of the pressing part 4 with the material to be grasped. The piston rod of the cylinder 41 pushes the pressure rod 42 to press down, and the pressure rod 42 drives the push rod 234 coaxial with it to press down, and the negative pressure at the end of the suction nozzle 231 is used to suck the material. After the material is absorbed, the rebound component 25 dri...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More