

Method and system for unmanned aerial vehicle to automatically avoid wires
An automatic obstacle avoidance, unmanned aerial vehicle technology, applied in the control/regulation system, non-electric variable control, vehicle position/route/altitude control and other directions, can solve the problem of poor reliability of wire obstacle avoidance, obstacle avoidance accuracy can not meet technical requirements, The safety distance is not easy to control and other problems, to achieve the effect of improving accuracy, ensuring safety, and improving reliability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0044]The invention provides a method for automatic obstacle-avoiding wires of an unmanned aerial vehicle, which can be applied to a server to control the safe distance between the wire and the unmanned aerial vehicle, so as to ensure the safest and most reliable flight path.
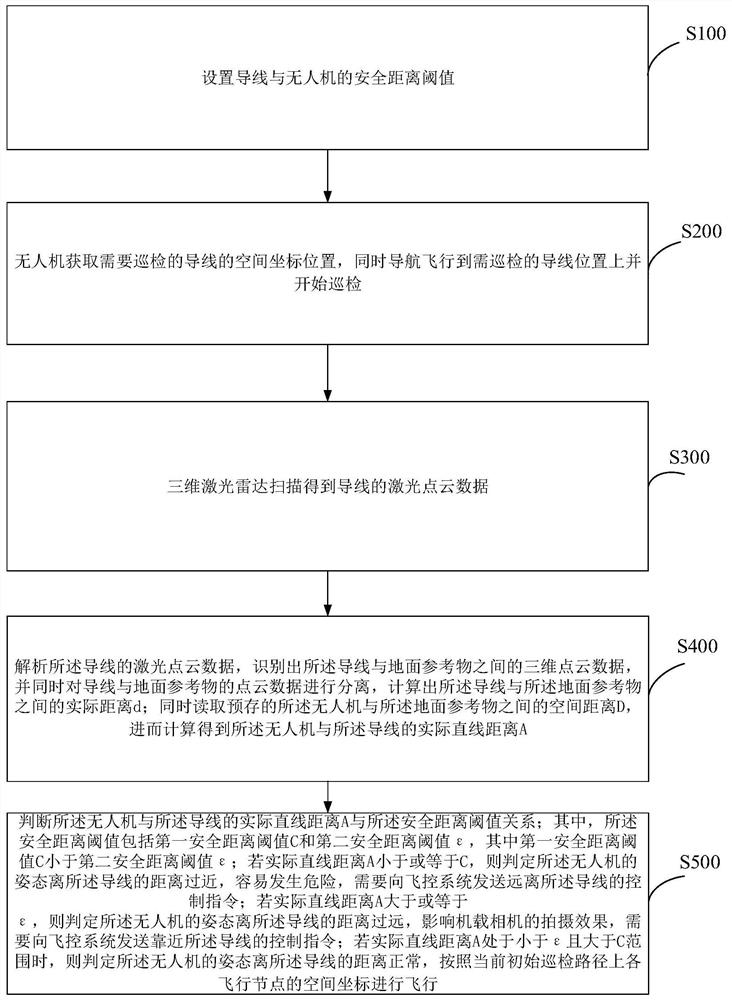
[0045] A method for automatic obstacle avoidance wires for unmanned aerial vehicles of the present invention will be described in detail below in conjunction with specific embodiments, such as figure 1 As shown, the specific steps are as follows:
[0046] Step S100: setting the safety distance threshold between the wire and the drone;
[0047] Step S200: The UAV obtains the spatial coordinate position of the wire that needs to be inspected, and at the same time navigates and flies to the position of the wire that needs to be inspected and starts the inspection;
[0048] Step S300: the laser point cloud data of the wire is obtained by scanning the three-dimensional laser radar;
[0049] Step S400: Anal...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More