Three-dimensional matching method for self-reconfiguration butt joint of reconfigurable spherical robot
A technology of spherical robot and three-dimensional matching, which is applied in the field of robotics, can solve problems such as the three-dimensional matching method of autonomous docking ability of spherical robots without technology, and achieve the effect of wide application and improved feature matching speed and accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0021] In order to better understand the technical solutions of the present invention, the embodiments of the present invention will be described in detail below in conjunction with the accompanying drawings.
[0022] In order to clearly understand the present invention, the mobile robot will be described below first.
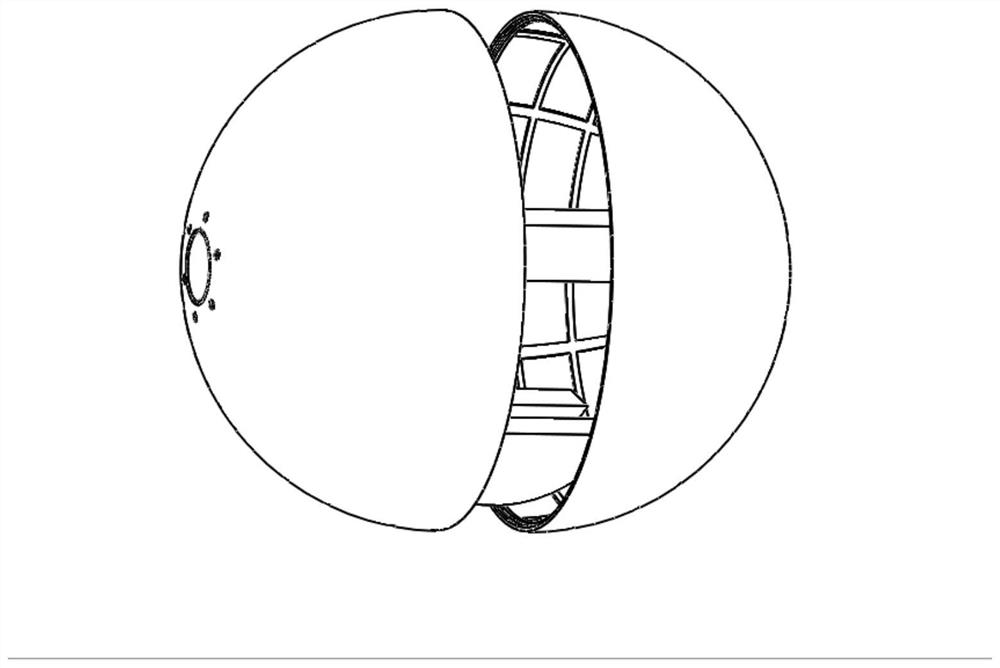
[0023] Such as figure 1 As shown, it is a schematic diagram of the working state of the reconfigurable spherical robot according to the embodiment of the present invention. The spherical robot adopts a scalable differential hemispherical shell scheme based on heavy pendulum drive, and the sensor and control system are binocular depth camera sensors and NVDIA Jetson TX2 artificial intelligence. Intelligent supercomputing platform. In the closed state of the spherical shell of a single ball, the robot rolls in the shape of a ball, which has the motion characteristics of a ball, has the characteristics of a tumbler and strong obstacle-crossing performance, and ha...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More