

Urban high-precision three-dimensional terrain construction method and system based on LiDAR point cloud data
A technology of 3D terrain and point cloud data, applied in 3D modeling, image data processing, neural learning methods, etc., can solve the problems of high update cost, lack of sponge city, poor current situation, etc., to improve accuracy and refinement. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0047] In order to make it easier for those skilled in the art to understand and implement the present invention, the present invention will be further described in detail below in conjunction with the accompanying drawings and specific embodiments. It should be understood that the implementation examples described here are only used to illustrate and explain the present invention, and are not intended to limit the present invention.
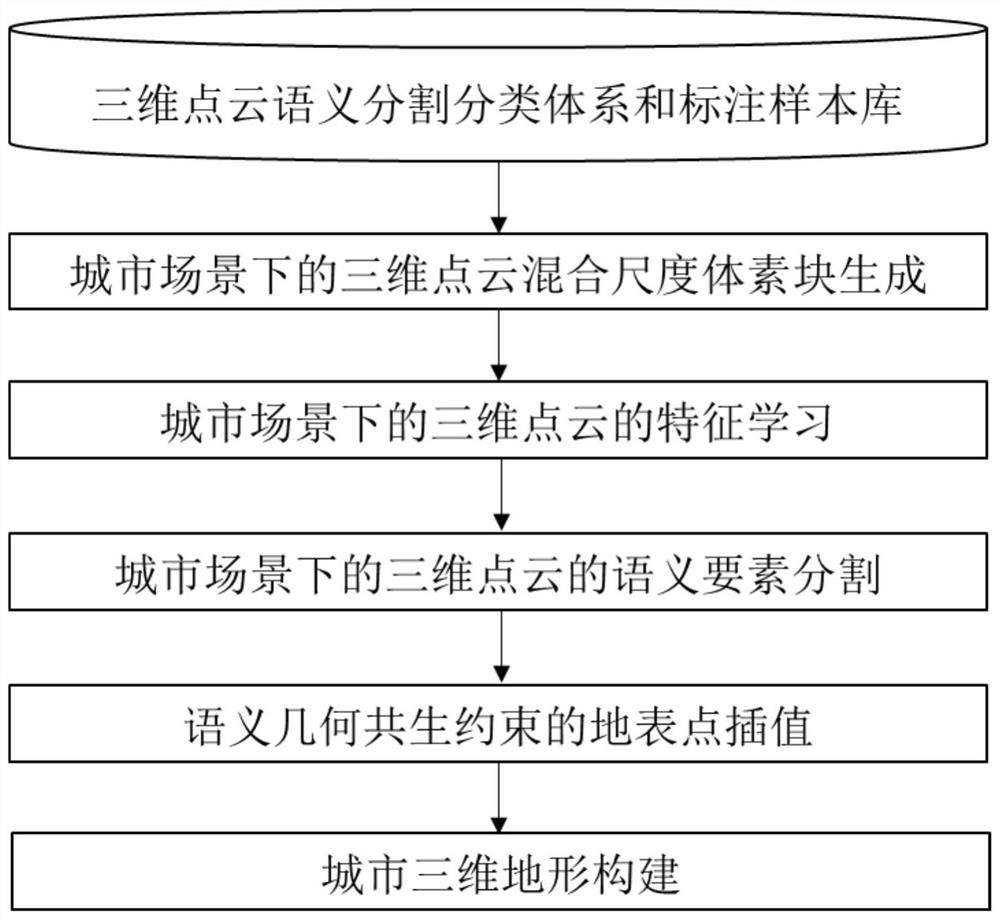
[0048] LiDAR stands for LiDAR. The point cloud data obtained by LiDAR has high measurement accuracy and can provide high-precision surface elevation information, spatial information, and echo intensity information that are not limited by shadow and light conditions. Based on LiDAR data, the patent of the present invention proposes a method for constructing urban high-precision three-dimensional terrain, so that the accuracy of urban three-dimensional terrain data can meet the application requirements of sponge city construction and urban waterlo...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More