Method and system for smooth transition of attitude
A technology of smooth transition and attitude, applied in the field of robotics, can solve the problem that the time derivative of the transition curve has no clear meaning, and achieve the effect of facilitating trajectory planning
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0085] This embodiment provides a detailed description of the gesture smooth transition method.
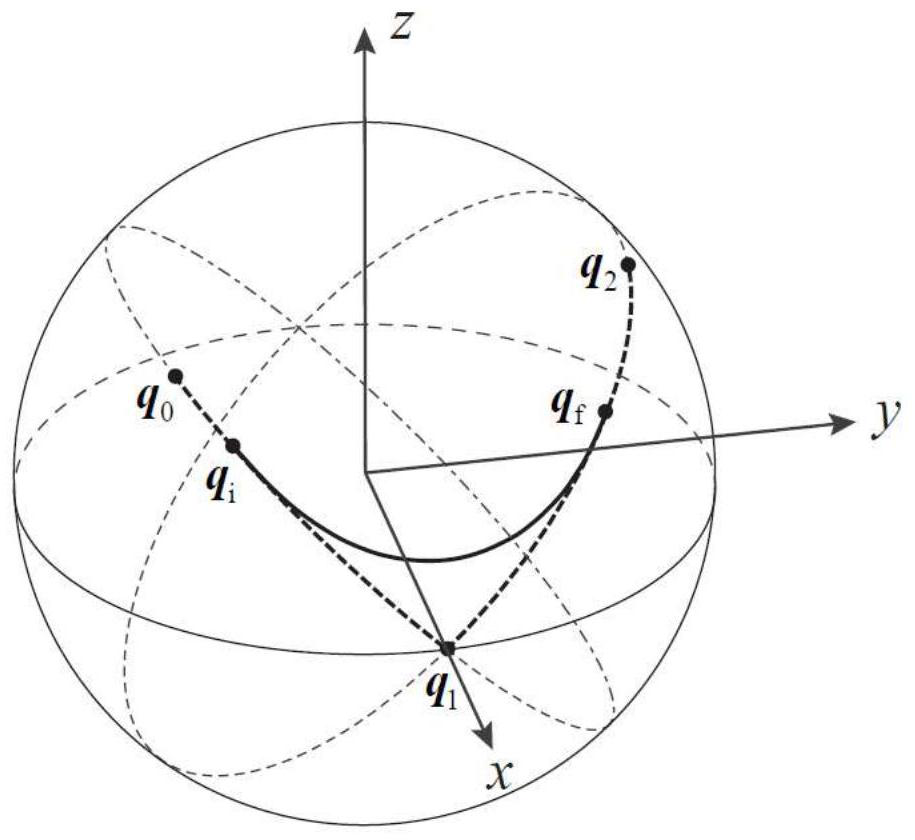
[0086] A method for attitude smooth transition, three attitudes q are known 0 ,q 1 ,q 2 , where by the pose q 0 to q 1 The axis of rotation is u 0 , the rotation angle is α 0 >0; by q 1 to q 2 The axis of rotation is u 1 , the rotation angle is α 1 >0; u 0 and u 1 The included angle is β, β≠0.
[0087] Select a reference coordinate system, and the coordinate vectors i, j, k of the reference system are determined by the following formula:
[0088]
[0089] In the reference frame, the axis of rotation u 0 , u 1 Expressed as
[0090]
[0091] The attitude is represented by the unit quaternion, according to the spherical linear interpolation, by q 0 to q 1 The interpolation curve of can be expressed by the following parametric equation:
[0092] q 01 (s)=p 01 (s)q 1 , s ∈ [0, α 0 ]
[0093] s is a parameter and
[0094]
[0095] represented by pose q ...
Embodiment 2
[0173] This embodiment provides when α 0 = 120°, α 1 =150°, α=90°, β=90°, q 1 = (1, (0, 0, 0)), the detailed description of the attitude transition curve is determined.
[0174] According to α and β, according to formula (4) to obtain
[0175]
[0176] θ m =arcsin(sin45°cos45°)=30°
[0177] By formula (6) get
[0178]
[0179] By formula (9) get
[0180]
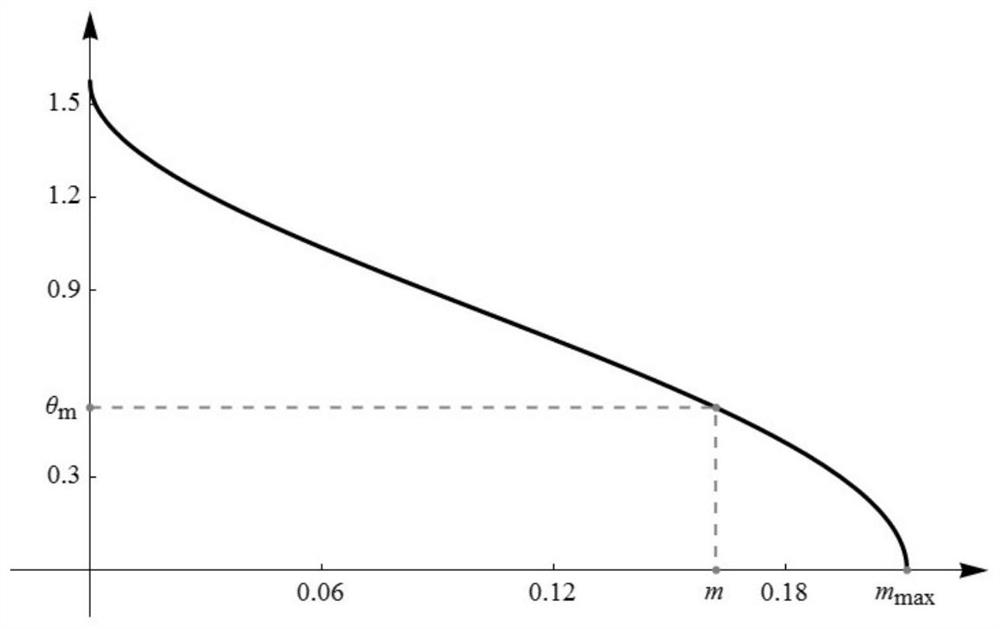
[0181] Using dichotomy, in the interval [0, m max ] to search for the root of m in formula (8), and get
[0182] m=0.161838
[0183] figure 1 For the right side of formula (8) in the interval [0, m max ] on the change graph, the vertical coordinate in the graph is θ m The abscissa value corresponding to the point is equal to m.
[0184] Calculated according to formula (6), formula (7) and formula (10)
[0185] n=0.265482, c ψ = 1.268094, σ = 2.587944
[0186] put m,n,c ψ , η, θ m Substituting the value of in turn into formula (5) and formula (3), we can get p 0 (s), p 1 (s) and p 2 The detailed e...
Embodiment 3
[0197] This embodiment provides an explanation of trajectory planning for the attitude transition curve in Embodiment 2 according to the change law of angular velocity.
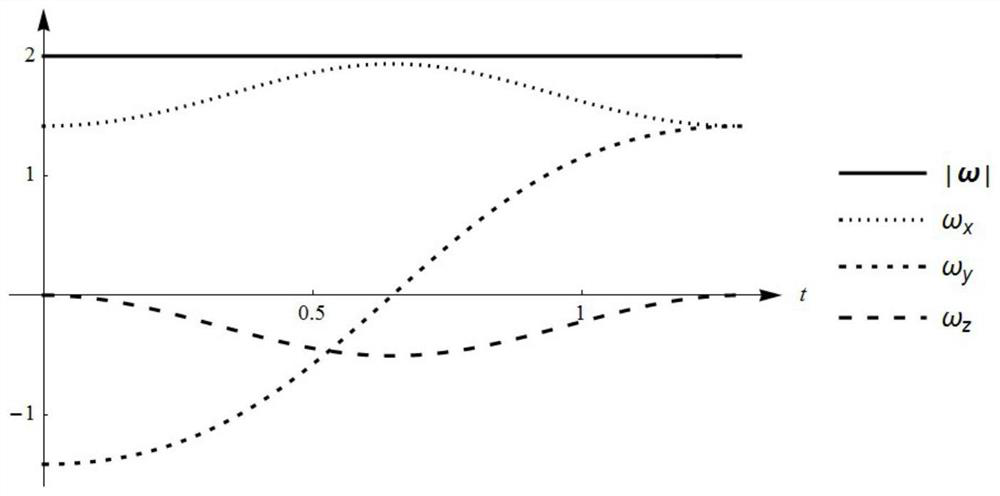
[0198] Perform trajectory planning on the attitude transition curve obtained in Embodiment 2, that is, determine the change law s(t) of the parameter s in the transition curve parameter equation with respect to time. The change law of known angular velocity is: at the starting point q i and endpoint q f The magnitude of the angular velocity is 2, and by q i transition to q f The angular velocity is kept constant during the process.
[0199] Using the derivative of parameter s with respect to time is equal to the size of angular velocity, we can get the variation law of parameter s with respect to time, s(t) should be
[0200] s(t)=2t, t∈[0,σ / 2]
[0201] After both q(s) and s(t) are determined, the change law of attitude over time can be obtained, image 3 It is the magnitude of the angular velocity ω an...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More